3. 产品概况
3.1 产品介绍
- 天工行者系列机器人是深圳优必选科技股份有限公司联合北京人形机器人创新中心有限公司研发的全尺寸纯电驱拟人奔跑机器人,具备高度仿生的躯干构型和拟人化的运动控制能力。最高可拥有 42 个自由度,双臂最高采用七自由度机械臂设计,手腕可搭载高精度六维力传感器,并可配备灵巧五指双手。
- 天工行者系列机器人可实现站立、行走、奔跑及多个特定动作,能够稳定适应斜坡、沙地等复杂地形,具备优异的动态平衡与抗干扰能力。搭载强劲关节驱动、高精度 IMU 与双电池快换系统,整机续航时间超过 3.5 小时。
- 此外,天工行者·无界及天工行者·无疆可集成语音模组与语音交互大模型,支持自然语言交互,整机算力最高可达 550 TOPS。
- 作为通用人形机器人平台,天工行者全系列开放全身关节及传感器接口,便于行业二次开发,以实现科研、教育等场景应用创新。
3.2 功能特点
- 复杂地形自适应:可平稳行走于斜坡、沙地等不规则地形;
- 拟人化奔跑:具备奔跑能力;
- 动态平衡控制:能实时抗外部干扰,维持姿态稳定;
- 运控模式:已部署强化学习运控模式;
- 语音交互控制:搭载语音模组,并支持客户自行搭载语音大模型,实现自然语音指令与交互;
- 开放式接口设计:提供全身关节与传感器接口,支持遥操作、数据采集与二次开发。
3.3 应用场景
本产品设计用于科研教学场景。
注意
- 用户可通过二次开发探索其他应用场景,但需自行确保符合该应用场景项下的法律法规、安全要求以及其他需要满足的资质;
- 任何超出科研教学用途的使用,相关责任均由用户自行承担;
- 禁止在无安全防护的公共场所或高风险环境等场景下(如救援、医疗护理等)直接使用原厂配置产品。
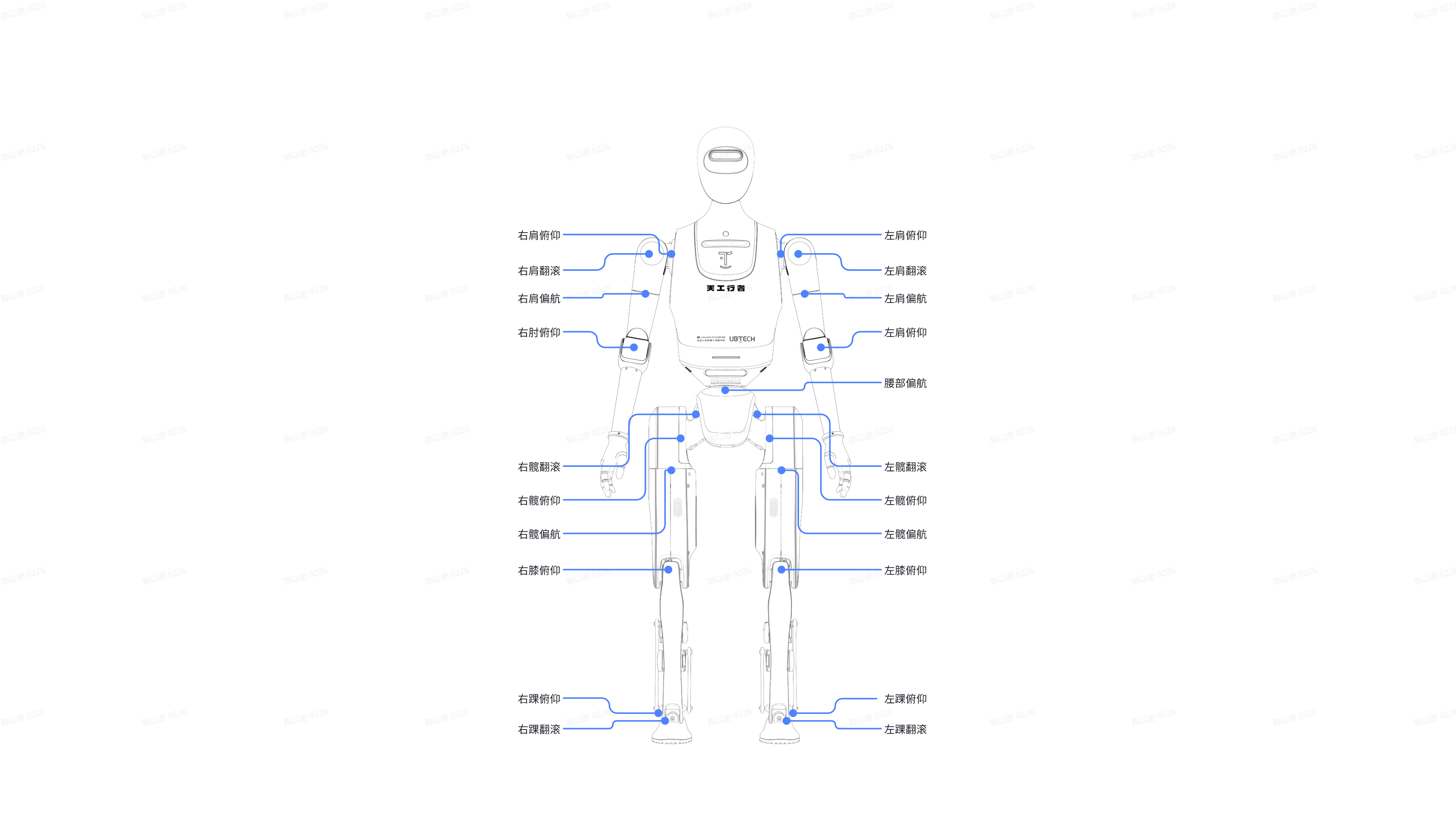
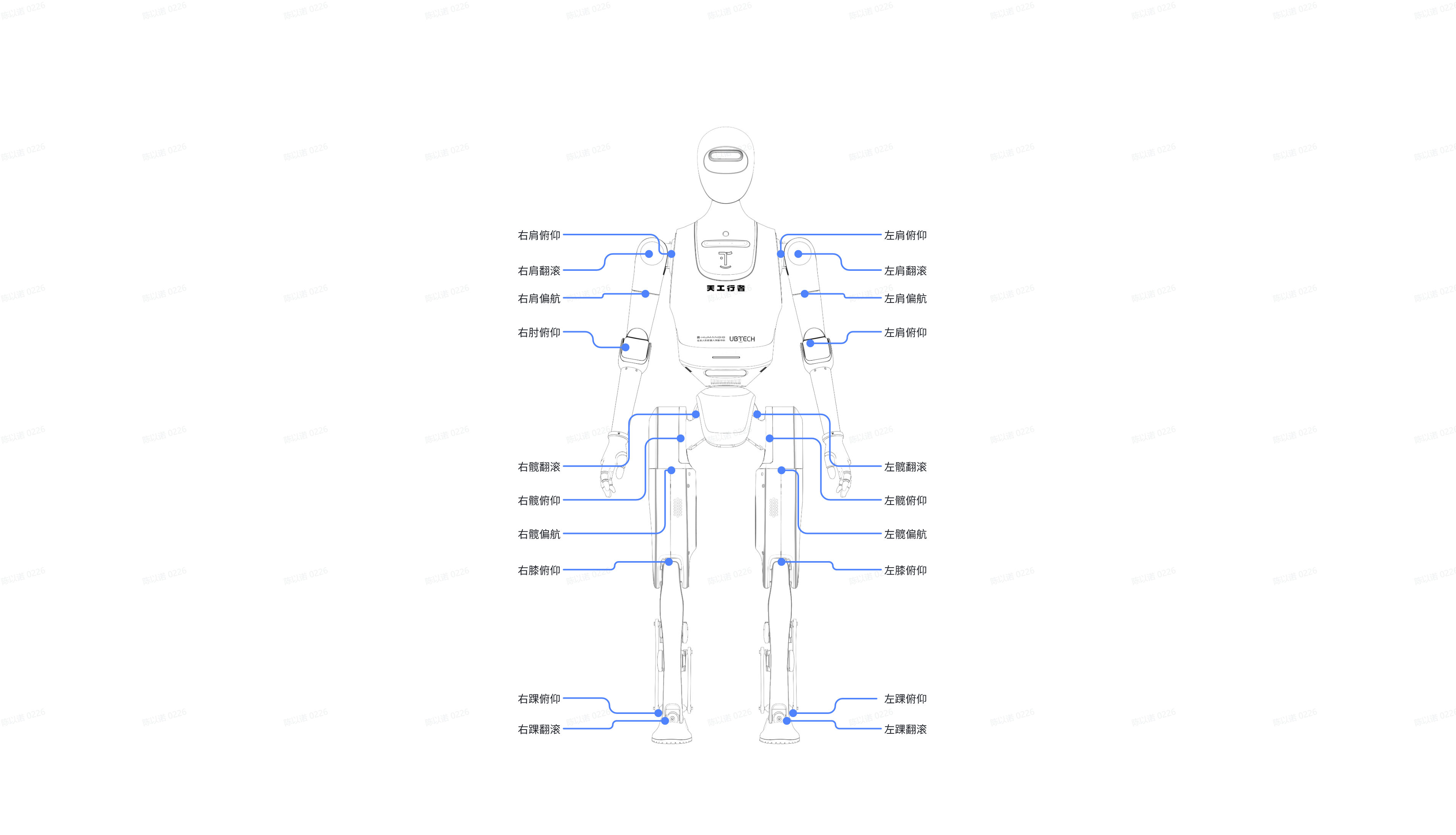
3.4 天工行者关节分布
- 天工行者·无疆
- 天工行者·无界
- 天工行者
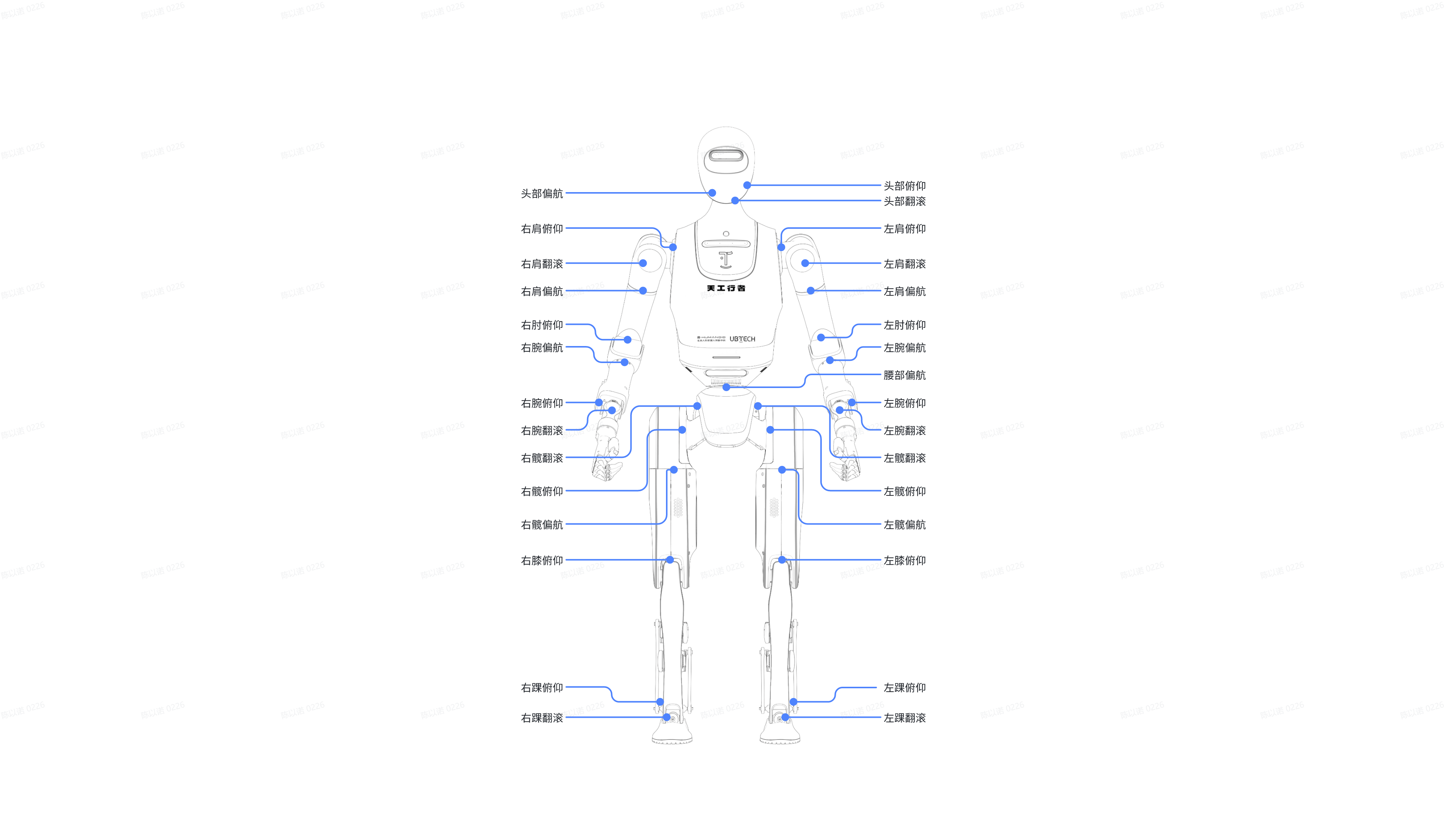
3.5 天工行者全身关节参数
| 名称 | 运动范围 (°) | 扭矩系数(Nm/A) | 最大转速(rpm) | KP/KD 范围 | 额定力矩(Nm) | 峰值力矩(Nm) | 关节名称 | 适用机型 |
|---|---|---|---|---|---|---|---|---|
| 头关节翻滚 Head Roll | -26° ~ +26° | 2.16 | 64 | Kp: 0~2000 kd:0~300 | 3 | 9 | 1 | 天工行者·无疆 |
| 头关节俯仰 Head Pitch | -25° ~ +25° | 2.16 | 64 | Kp:0~2000 kd:0~300 | 3 | 9 | 2 | 天工行者·无疆 |
| 头关节偏航 Head Yaw | -90° ~ +90° | 2.16 | 64 | Kp:0~2000 kd:0~300 | 3 | 9 | 3 | 天工行者·无疆 |
| 腰关节偏航 Waist Yaw | -170° ~ +170° | 3.207 | 88 | Kp:0~2000 kd:0~300 | 35 | 91 | 31 | 天工行者·无疆/天工行者·无界 |
| 左肩关节俯仰 Left Shoulder Pitch | -170° ~ +170° | 3.207 | 88 | Kp:0~2000 kd:0~300 | 35 | 91 | 11 | 天工行者·无疆/天工行者·无界/天工行者 |
| 左肩关节翻滚 Left Shoulder Roll | -15° ~ +150° | 3.37 | 120 | Kp:0~2000 kd:0~300 | 20 | 60 | 12 | 天工行者·无疆/天工行者·无界/天工行者 |
| 左肩关节偏航 Left Shoulder Yaw | -170° ~ +170° | 2.43 | 73 | Kp:0~2000 kd:0~300 | 10 | 30 | 13 | 天工行者·无疆/天工行者·无界/天工行者 |
| 左肘关节俯仰 Left Elbow Pitch | -150° ~ +15° | 2.43 | 73 | Kp:0~2000 kd:0~300 | 10 | 30 | 14 | 天工行者·无疆/天工行者·无界/天工行者 |
| 左腕关节偏航 Left Wrist Yaw | -170°~ +170° | 1.71 | 146 | Kp:0~2000 kd:0~300 | 5 | 15 | 15 | 天工行者·无疆 |
| 左腕关节俯仰 Left Wrist Pitch | -45° ~ +60° | 2.16 | 72 | Kp:0~2000 kd:0~300 | 3 | 9 | 16 | 天工行者·无疆 |
| 左腕关节翻滚 Left WristRoll | -95° ~ +75° | 2.16 | 72 | Kp:0~2000 kd:0~300 | 3 | 9 | 17 | 天工行者·无疆 |
| 右肩关节俯仰 Right Shoulder Pitch | -170°~ +170° | 3.207 | 88 | Kp:0~2000 kd:0~300 | 35 | 91 | 21 | 天工行者·无疆/天工行者·无界/天工行者 |
| 右肩关节翻滚 Right Shoulder Roll | -150° ~ +15° | 3.37 | 120 | Kp:0~2000 kd:0~300 | 20 | 60 | 22 | 天工行者·无疆/天工行者·无界/天工行者 |
| 右肩关节偏航 Right Shoulder Yaw | -170°~ +170° | 2.43 | 73 | Kp:0~2000 kd:0~300 | 10 | 30 | 23 | 天工行者·无疆/天工行者·无界/天工行者 |
| 右肘关节俯仰 Right Elbow Pitch | -150° ~ +15° | 2.43 | 73 | Kp:0~2000 kd:0~300 | 10 | 30 | 24 | 天工行者·无疆/天工行者·无界/天工行者 |
| 右腕关节偏航 Right Wrist Yaw | -170° ~ +170° | 1.71 | 146 | Kp:0~2000 kd:0~300 | 5 | 15 | 25 | 天工行者·无疆 |
| 右腕关节俯仰 Right Wrist Pitch | -45° ~ +60° | 2.16 | 72 | Kp:0~2000 kd:0~300 | 3 | 9 | 26 | 天工行者·无疆 |
| 右腕关节翻滚 Right Wrist Roll | -75° ~ +95° | 2.16 | 72 | Kp:0~2000 kd:0~300 | 3 | 9 | 27 | 天工行者·无疆 |
| 髋关节翻滚 Hip Roll | -45° ~ +45° | 2.3 | 125 | Kp:0~2000 kd:0~300 | / | 124 | 左 51 右 61 | 天工行者·无疆/天工行者·无界/天工行者 |
| 髋关节俯仰 Hip Pitch | -160° ~ 120° | 2 | 125 | Kp:0~2000 kd:0~300 | / | 300 | 左 52 右62 | 天工行者·无疆/天工行者·无界/天工行者 |
| 髋关节偏航 Hip Yaw | -60° ~ 60° | 2.3 | 125 | Kp:0~2000 kd:0~300 | / | 124 | 左 53 右 63 | 天工行者·无疆/天工行者·无界/天工行者 |
| 膝关节俯仰 Knee Pitch | 0° ~ 137° | 2 | 125 | Kp:0~2000 kd:0~300 | / | 300 | 左 54 右 64 | 天工行者·无疆/天工行者·无界/天工行者 |
| 踝关节俯仰 Ankle Pitch | -70° ~ 30° | 2.6 | 128 | Kp:0~2000 kd:0~300 | / | 36 | 左 55 右 65 | 天工行者·无疆/天工行者·无界/天工行者 |
| 踝关节翻滚 Ankle Roll | -30° ~ 30° | 2.6 | 128 | Kp:0~2000 kd:0~300 | / | 36 | 左 56 右 66 | 天工行者·无疆/天工行者·无界/天工行者 |
灵巧手参数说明,仅天工行者·无疆适配灵巧手
| 角度 | 运动范围 (°) | 图例说明 |
|---|---|---|
| 小拇指和无名指 中指和食指 | +19° ~ +176.7° |  |
| 大拇指弯曲角度 | -13° ~ +53.6° |  |
| 大拇指旋转角度 | +90° ~ +165° |  |
3.6 整机 urdf,坐标系,关节旋转轴与关节零点
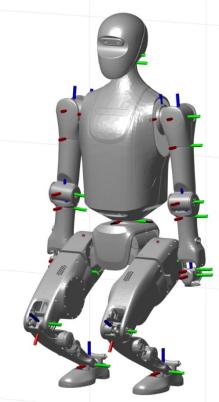
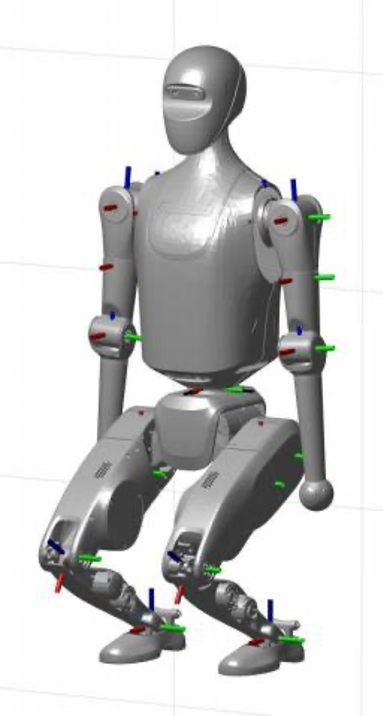
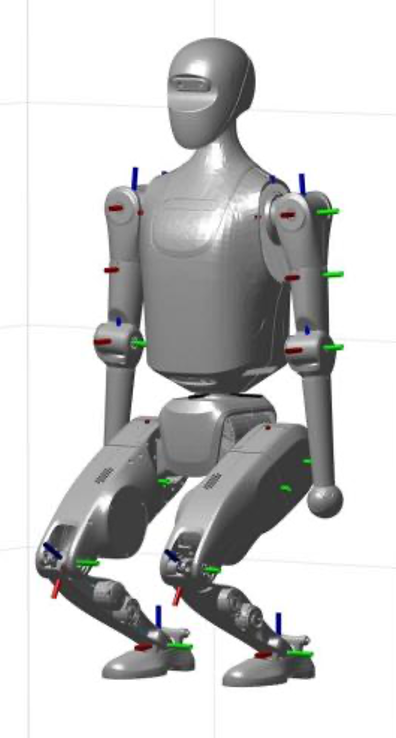
3.6.1 关节零点
- 天工行者·无疆
- 天工行者·无界
- 天工行者
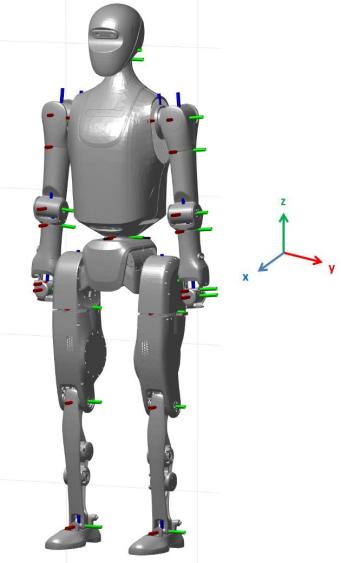
3.6.2 整机坐标系
- 整机坐标系-X 轴(Roll) 以机器人前方为正方向;
- 整机坐标系-Y 轴(Pitch) 以机器人左方为正方向;
- 整机坐标系-Z 轴(Yaw) 以机器人上方为正方向;
三个型号的整机坐标系方向均一致。
3.6.3 旋转轴 & 正方向
-
机器人每个旋转轴的轴线 ,按照上图机器人的各轴状态为基准 ,和机器人整机坐标系的 正方向对应去寻找旋转轴的正方向;
-
举例:
- 比如腰部关节的轴线是竖直的,和整机 Z 轴(Yaw)靠近,所以腰部关节的正方向 是向上 , 同构右手定则能够确认关节的旋转正方向;
- 比如腿部髋关节 Pitch 的轴线 ,和整机 Y 轴( Pitch) 靠近 ,所以髋关节 Pitch 的 正方向是向左 , 同构右手定则能够确认关节的旋转正方向。