6. SDK 概述
天工行者人形机器人SDK提供了丰富的接口,涵盖各部位电机控制、IMU(惯性测量单元)、语音、电池、遥控器等。可用于编写和部署 机器人应用程序,旨在帮助开发人员快速灵活地构建自己的应用程序来精确控制和使用机器 人 ,以满足在不同应用场景下的需求。
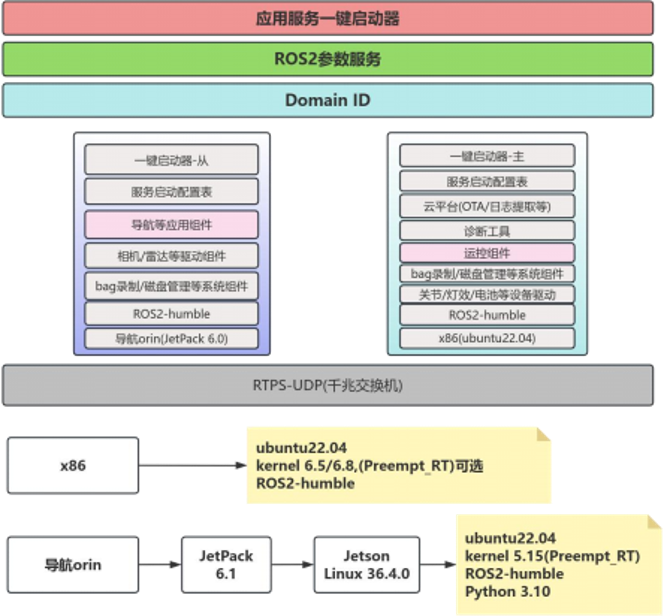
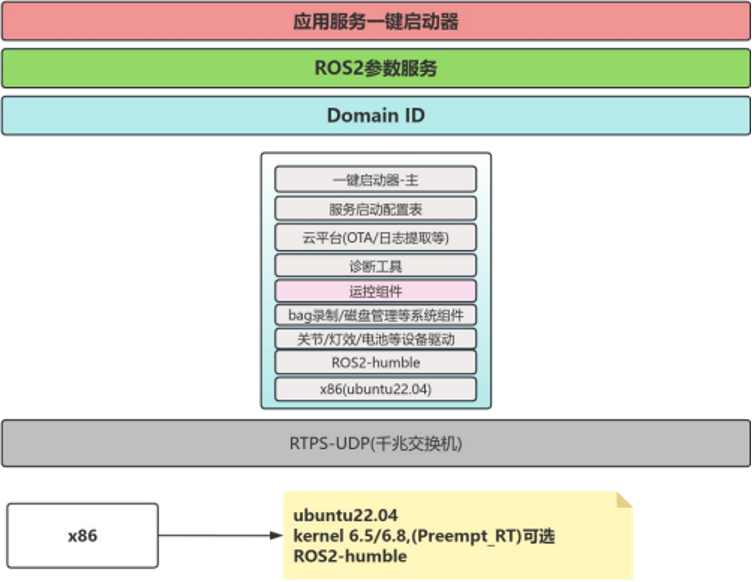
6.1 基本框架 - ROS2
- 天工行者·无疆
- 天工行者·无界
- 天工行者
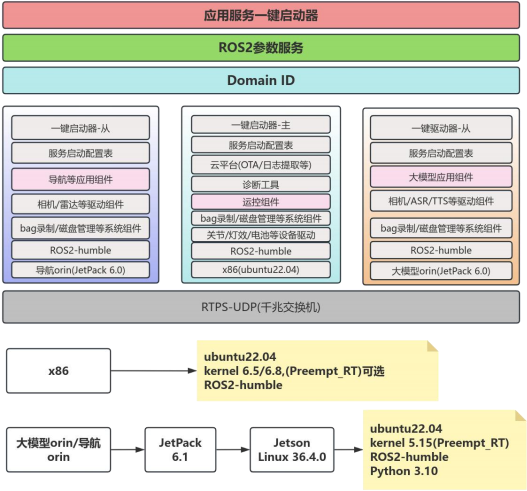
6.2 系统环境依赖
为了确保最佳的开发体验和兼容性,建议在 Ubuntu 22.04 系统下进行开发。当前暂不支持在 Mac 和 Windows 系统下开发。
6.3 运行环境说明
6.3.1 整体参数配置路径
#x86 全局配置参数路径
/home/ubuntu/data/param
#orin 全局配置参数路径
/home/nvidia/data/param
6.3.2 配置参数及环境变量
配置参数位置:/home/ubuntu/data/param/ros2_config.txt
ROS_LOG_DIR =/home/ubuntu/logs
ROS2_BAG_DIR =/home/ubuntu/bags
FASTRTPS_DEFAULT_PROFILES_FILE =/home/ubuntu/data/param/dds_profile.xml RMW_IMPLEMENTATION =rmw_fastrtps_cpp
ROS_DOMAIN_ID =0
注:
ROS_LOG_DIR:日志保存位置
ROS2_BAG_DIR:bag 包保存位置
FASTRTPS_DEFAULT_PROFILES_FILE:dds 配置文件,默认禁止使用 wifi 调试 dds 通信;
RMW_IMPLEMENTATION:使用的中间件类型
ROS_DOMAIN_ID:domain id
环境变量:/home/ubuntu/data/param/ros2_setup.bash
上面的配置参数在登录终端时自动导出为环境变量 ,也可执行以下命令手动导出
source /home/ubuntu/data/param/ros2_setup.bash