6. SDK Overview
The Walker Tienkung humanoid robot SDK provides a comprehensive set of interfaces covering motor control for all body parts, IMU (Inertial Measurement Unit), voice, battery, remote controller, and more. It can be used to develop and deploy robot applications, enabling developers to quickly and flexibly build applications to precisely control and operate the robot to meet the requirements of different application scenarios.
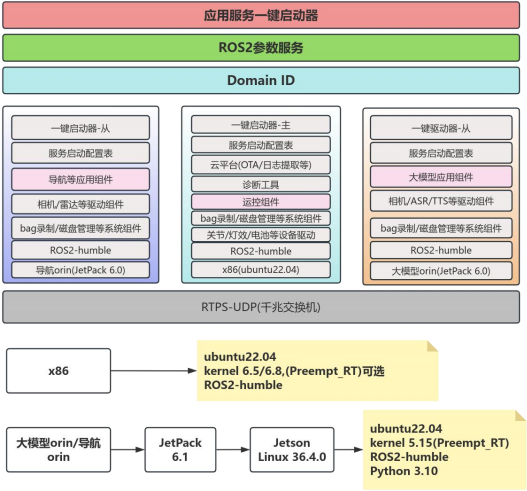
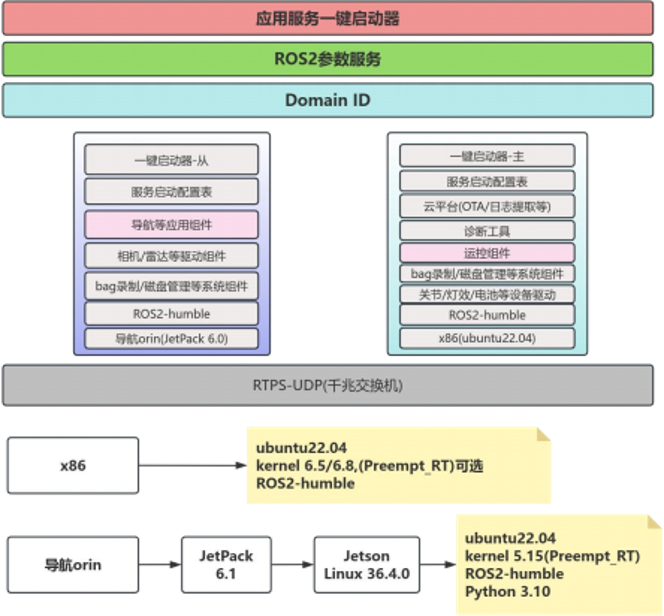
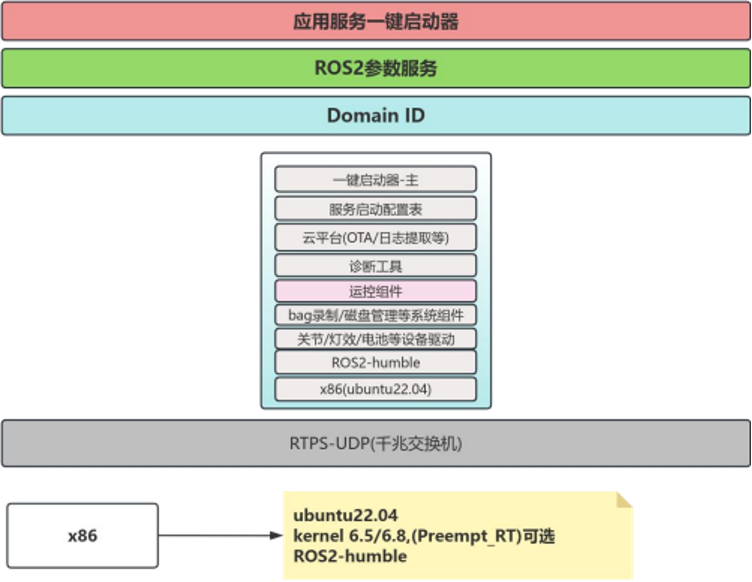
6.1 Basic Architecture – ROS2
- Walker Tienkung · Embodied Intelligence
- Walker Tienkung · Voice & Vision
- Walker Tienkung
6.2 System Environment Requirements
To ensure the best development experience and compatibility, it is recommended to perform development under Ubuntu 22.04. Development on macOS and Windows is currently not supported.
6.3 Runtime Environment Description
6.3.1 Global Configuration Paths
# Global configuration path on x86
/home/ubuntu/data/param
# Global configuration path on Orin
/home/nvidia/data/param
6.3.2 Configuration Parameters and Environment Variables
Configuration file path: /home/ubuntu/data/param/ros2_config.txt
ROS_LOG_DIR=/home/ubuntu/logs
ROS2_BAG_DIR=/home/ubuntu/bags
FASTRTPS_DEFAULT_PROFILES_FILE=/home/ubuntu/data/param/dds_profile.xml
RMW_IMPLEMENTATION=rmw_fastrtps_cpp
ROS_DOMAIN_ID=0
Notes:
ROS_LOG_DIR: Log storage directoryROS2_BAG_DIR: Bag file storage directoryFASTRTPS_DEFAULT_PROFILES_FILE: DDS configuration file (by default, Wi‑Fi debugging of DDS communication is disabled)RMW_IMPLEMENTATION: Middleware implementation type in useROS_DOMAIN_ID: ROS 2 domain ID
Environment variable setup script: /home/ubuntu/data/param/ros2_setup.bash
The above configuration parameters are automatically exported as environment variables when logging into the terminal. They can also be exported manually by running:
source /home/ubuntu/data/param/ros2_setup.bash