3. Product Overview
3.1 Product Introduction
- The Walker Tienkung series robots are full-size pure electric drive humanoid running robots developed by Shenzhen UBTECH Robotics Corp., Ltd. in collaboration with Beijing Humanoid Robot Innovation Center Co., Ltd. They have a highly bionic torso configuration and humanoid motion control capabilities. They can have up to 42 degrees of freedom. The arms can be equipped with seven-degree-of-freedom robotic arms. The wrists can be equipped with high-precision six-axis force sensors and can be equipped with dexterous five-finger hands.
- The Walker Tienkung series robots can achieve standing, walking, running, and multiple specific actions. They can stably adapt to complex terrains such as slopes and sandy ground, and have excellent dynamic balance and anti-interference capabilities. Equipped with powerful joint drives, high-precision IMU, and dual battery quick-change system, the overall battery life exceeds 3.5 hours.
- In addition, Walker Tienkung·Voice & Vision and Walker Tienkung·Embodied Intelligence can integrate voice modules and voice interaction large models to support natural language interaction, with a maximum computing power of 550 TOPS.
- As a general humanoid robot platform, the entire Walker Tienkung series opens up full-body joints and sensor interfaces, facilitating secondary development in the industry to achieve application innovation in scenarios such as scientific research and education.
3.2 Functional Features
- Complex Terrain Adaptation: Can walk smoothly on irregular terrains such as slopes and sandy ground;
- Humanoid Running: Has running capability;
- Dynamic Balance Control: Can resist external interference in real-time and maintain posture stability;
- Two Motion Control Modes: Traditional motion control mode and reinforcement learning motion control mode have been deployed;
- Voice Interaction Control: Equipped with voice modules and supports customers to build their own voice large models to achieve natural voice commands and interaction;
- Open Interface Design: Provides full-body joints and sensor interfaces, supporting remote operation, data collection, and secondary development.
3.3 Application Scenarios
This product is designed for scientific research and teaching scenarios.
Precautions:
- Users can explore other application scenarios through secondary development, but they need to ensure compliance with laws and regulations, safety requirements, and other qualifications that need to be met under that application scenario;
- Any use beyond scientific research and teaching purposes shall be the responsibility of the user;
- It is prohibited to directly use the original factory configuration products in public places without safety protection or high-risk environments (such as rescue, medical care, etc.).
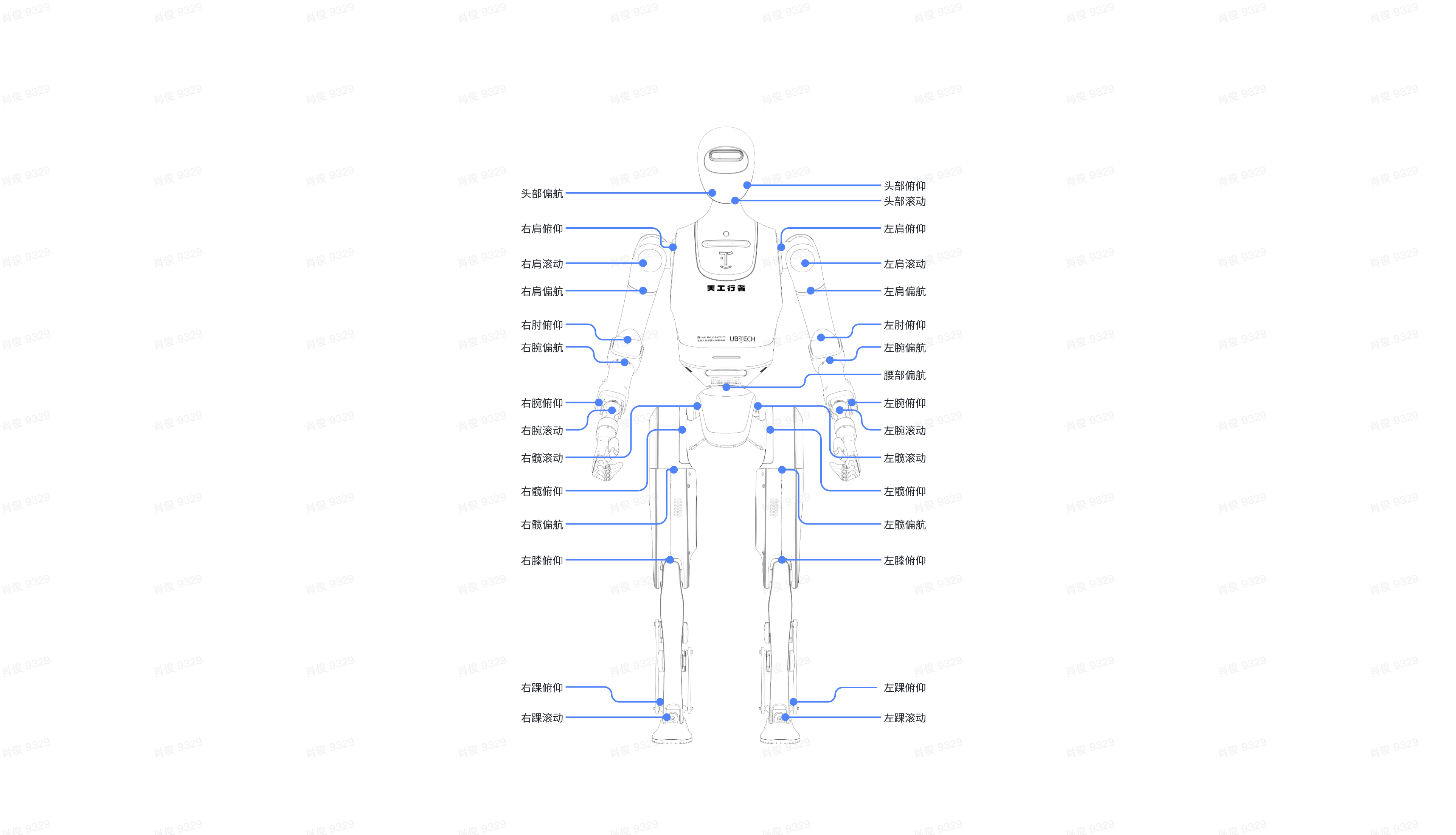
3.4 Walker Tienkung Joint Distribution
3.4.1 Walker Tienkung·Embodied Intelligence
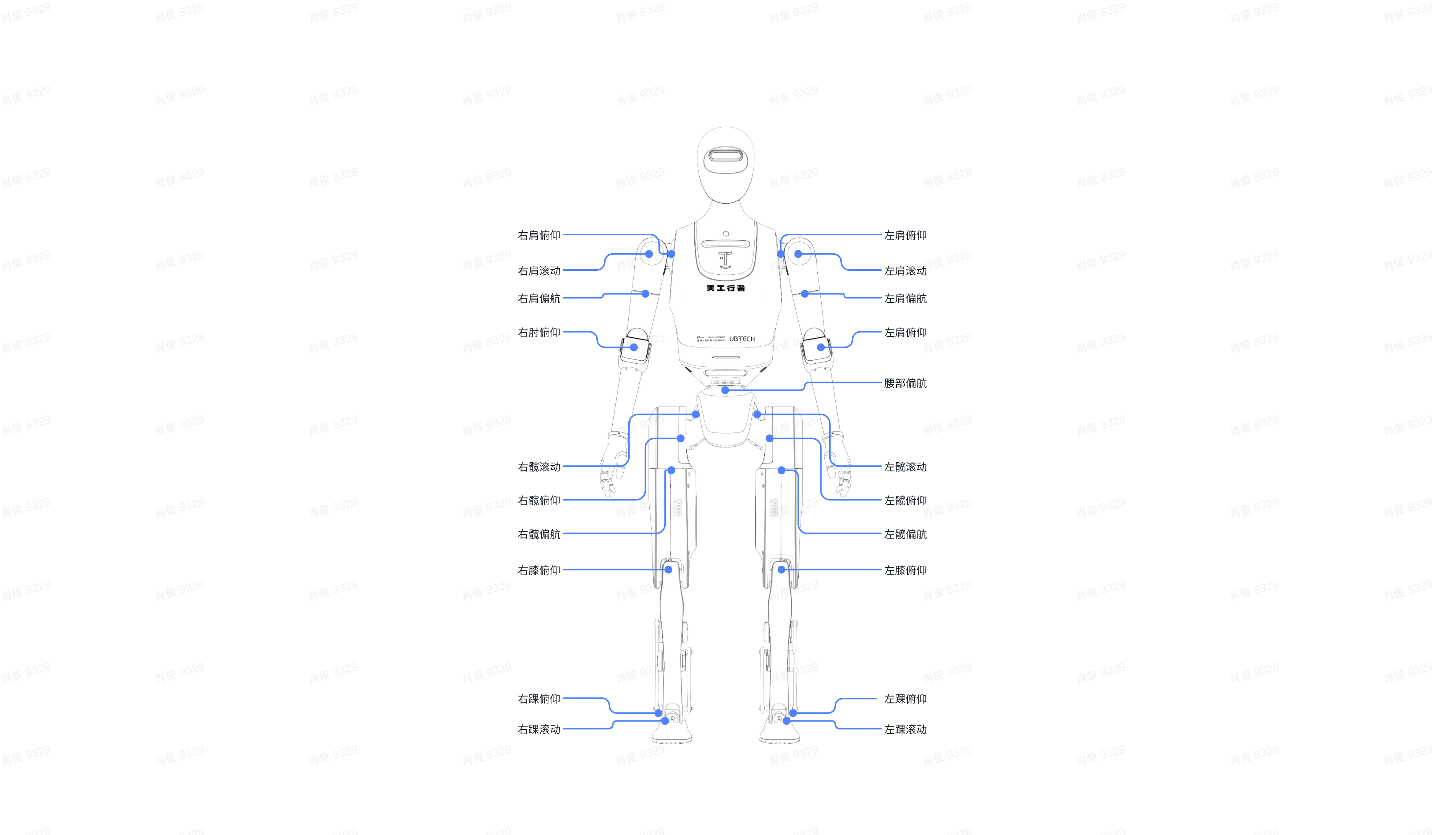
3.4.2 Walker Tienkung·Voice & Vision
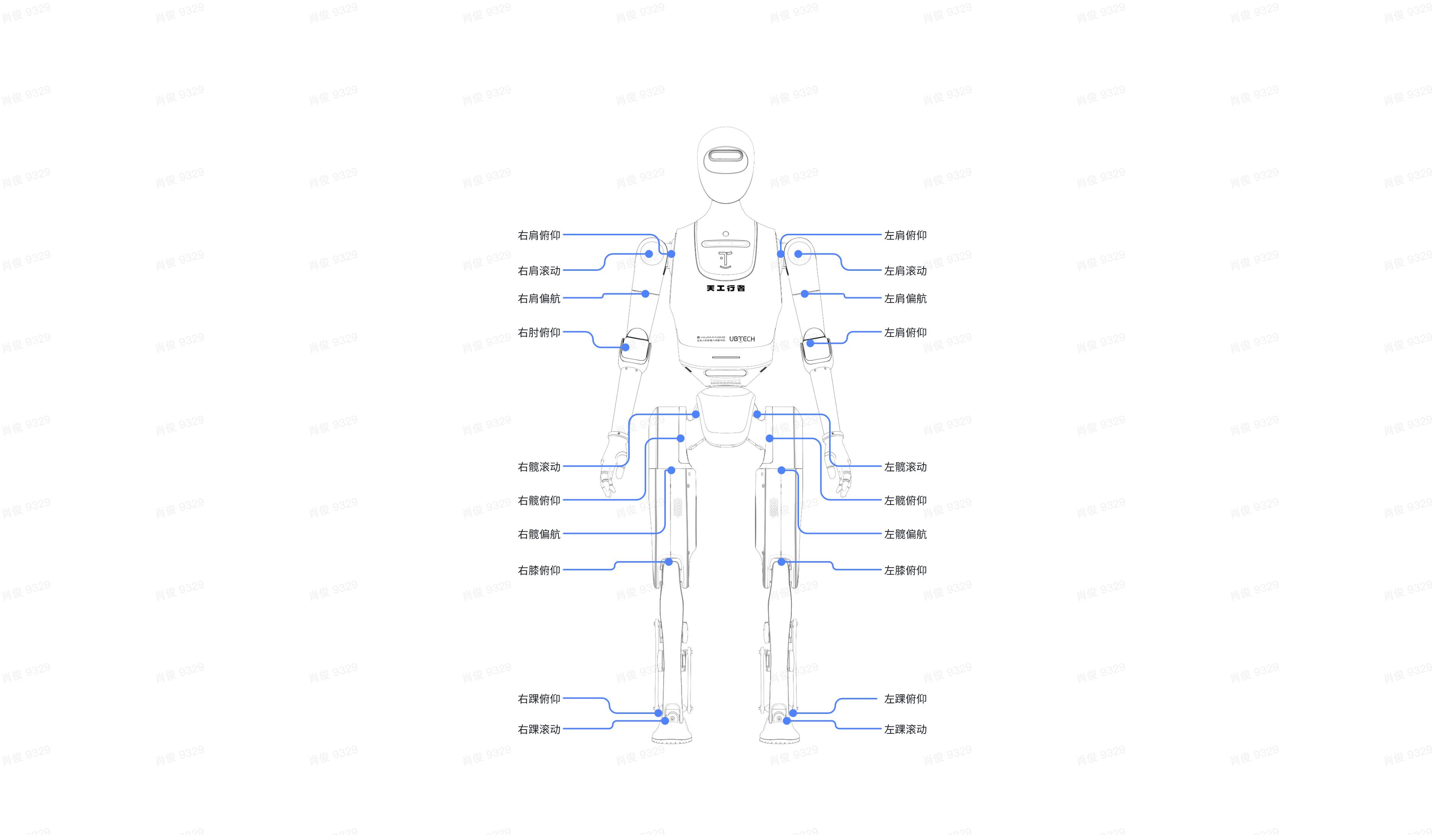
3.4.3 Walker Tienkung
3.5 Walker Tienkung Full Body Joint Parameters
| Body Part | Name | Range of Motion (°) | Torque Coefficient (Nm/A) | Max Speed (rpm) | KP/KD Range | Rated Torque (Nm) | Peak Torque (Nm) | Joint Name | Applicable Model |
|---|---|---|---|---|---|---|---|---|---|
| Head | Head Roll | -26° ~ +26° | 2.16 | 64 | Kp: 0~2000 kd: 0~300 | 3 | 9 | 1 | Walker Tienkung·Embodied Intelligence |
| Head Pitch | -25° ~ +25° | 2.16 | 64 | Kp: 0~2000 kd: 0~300 | 3 | 9 | 2 | Walker Tienkung·Embodied Intelligence | |
| Head Yaw | -90° ~ +90° | 2.16 | 64 | Kp: 0~2000 kd: 0~300 | 3 | 9 | 3 | Walker Tienkung·Embodied Intelligence | |
| Waist | Waist Yaw | -170° ~ +170° | 3.207 | 88 | Kp: 0~2000 kd: 0~300 | 35 | 91 | 31 | Walker Tienkung·Embodied Intelligence/Walker Tienkung·Voice & Vision |
| Left Arm | Left Shoulder Pitch | -170° ~ +170° | 3.207 | 88 | Kp: 0~2000 kd: 0~300 | 35 | 91 | 11 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker |
| Left Shoulder Roll | -15° ~ +150° | 3.37 | 120 | Kp: 0~2000 kd: 0~300 | 20 | 60 | 12 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker | |
| Left Shoulder Yaw | -170° ~ +170° | 2.43 | 73 | Kp: 0~2000 kd: 0~300 | 10 | 30 | 13 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker | |
| Left Elbow Pitch | -150° ~ +15° | 2.43 | 73 | Kp: 0~2000 kd: 0~300 | 10 | 30 | 14 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker | |
| Left Wrist Yaw | -170° ~ +170° | 1.71 | 146 | Kp: 0~2000 kd: 0~300 | 5 | 15 | 15 | Walker Tienkung·Embodied Intelligence | |
| Left Wrist Pitch | -45° ~ +60° | 2.16 | 72 | Kp: 0~2000 kd: 0~300 | 3 | 9 | 16 | Walker Tienkung·Embodied Intelligence | |
| Left Wrist Roll | -95° ~ +75° | 2.16 | 72 | Kp: 0~2000 kd: 0~300 | 3 | 9 | 17 | Walker Tienkung·Embodied Intelligence | |
| Right Arm | Right Shoulder Pitch | -170° ~ +170° | 3.207 | 88 | Kp: 0~2000 kd: 0~300 | 35 | 91 | 21 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker |
| Right Shoulder Roll | -150° ~ +15° | 3.37 | 120 | Kp: 0~2000 kd: 0~300 | 20 | 60 | 22 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker | |
| Right Shoulder Yaw | -170° ~ +170° | 2.43 | 73 | Kp: 0~2000 kd: 0~300 | 10 | 30 | 23 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker | |
| Right Elbow Pitch | -150° ~ +15° | 2.43 | 73 | Kp: 0~2000 kd: 0~300 | 10 | 30 | 24 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker | |
| Right Wrist Yaw | -170° ~ +170° | 1.71 | 146 | Kp: 0~2000 kd: 0~300 | 5 | 15 | 25 | Walker Tienkung·Embodied Intelligence | |
| Right Wrist Pitch | -45° ~ +60° | 2.16 | 72 | Kp: 0~2000 kd: 0~300 | 3 | 9 | 26 | Walker Tienkung·Embodied Intelligence | |
| Right Wrist Roll | -75° ~ +95° | 2.16 | 72 | Kp: 0~2000 kd: 0~300 | 3 | 9 | 27 | Walker Tienkung·Embodied Intelligence | |
| Legs | Hip Roll | -45° ~ +45° | 2.3 | 125 | Kp: 0~2000 kd: 0~300 | / | 124 | L51 R61 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker |
| Hip Pitch | -160° ~ 120° | 2 | 125 | Kp: 0~2000 kd: 0~300 | / | 300 | L52 R62 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker | |
| Hip Yaw | -60° ~ 60° | 2.3 | 125 | Kp: 0~2000 kd: 0~300 | / | 124 | L53 R63 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker | |
| Knee Pitch | 0° ~ 137° | 2 | 125 | Kp: 0~2000 kd: 0~300 | / | 300 | L54 R64 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker | |
| Ankle Pitch | -70° ~ 30° | 2.6 | 128 | Kp: 0~2000 kd: 0~300 | / | 36 | L55 R65 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker | |
| Ankle Roll | -30° ~ 30° | 2.6 | 128 | Kp: 0~2000 kd: 0~300 | / | 36 | L56 R66 | Walker Tienkung·Embodied Intelligence/Voice & Vision/Walker |
Dexterous hand parameter description, only Walker Tienkung·Embodied Intelligence is compatible with dexterous hands
| Angle | Range of Motion (°) | Illustration |
|---|---|---|
| Pinky, Ring, Middle, Index Fingers | +19° ~ +176.7° |  |
| Thumb Bending Angle | -13° ~ +53.6° |  |
| Thumb Rotation Angle | +90° ~ +165° |  |
3.6 Complete URDF, Coordinate System, Joint Rotation Axis and Joint Zero Point
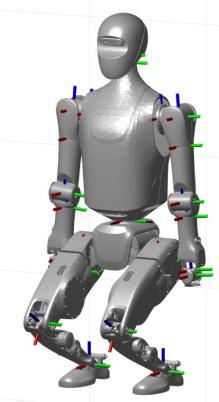
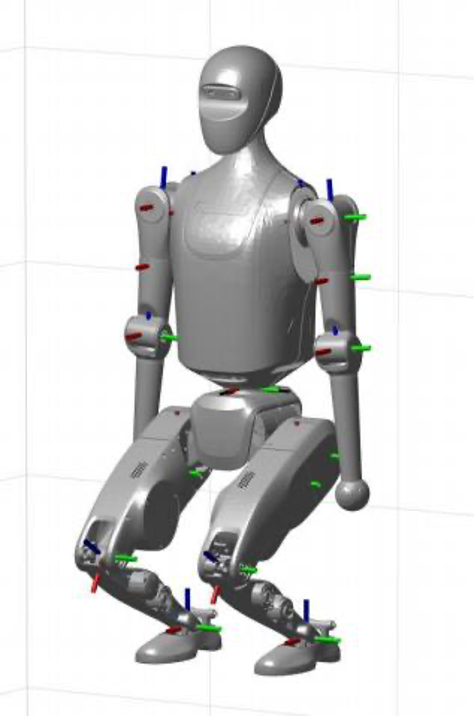
3.6.1 Joint Zero Point
1. Walker Tienkung·Embodied Intelligence is shown in the figure below:
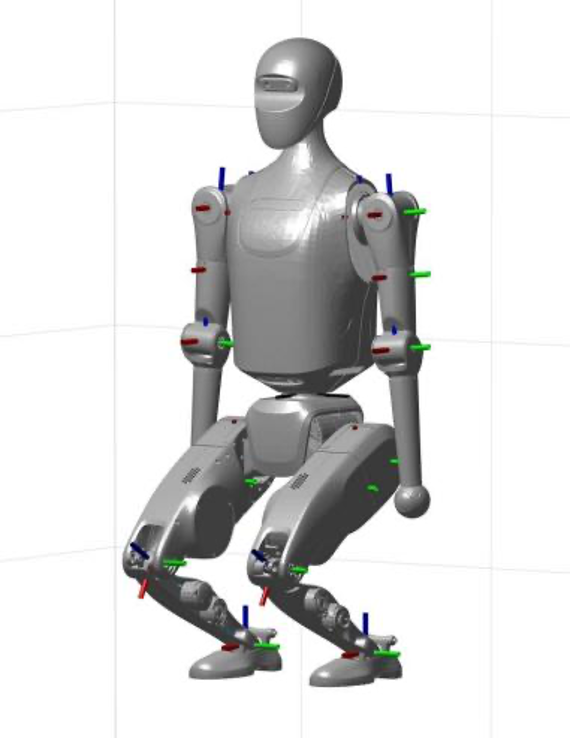
2. Walker Tienkung·Voice & Vision is shown in the figure below:
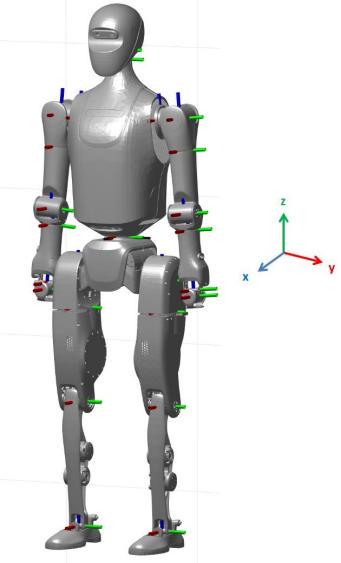
3. Walker Tienkung is shown in the figure below:
3.6.2 Complete Coordinate System
1. Complete Coordinate System - X Axis (Roll) - Positive direction is the front of the robot;
2. Complete Coordinate System - Y Axis (Pitch) - Positive direction is the left side of the robot;
3. Complete Coordinate System - Z Axis (Yaw) - Positive direction is the top of the robot;
The coordinate system directions of all three models are consistent.
3.6.3 Rotation Axis & Positive Direction
- The axis of each rotation axis of the robot is based on the state of each axis of the robot in the above figure, and corresponds to the positive direction of the robot's complete coordinate system to find the positive direction of the rotation axis;
- Example:
- For example, the axis of the waist joint is vertical and close to the Z axis (Yaw) of the complete machine, so the positive direction of the waist joint is upward, and the positive rotation direction of the joint can be determined by the right-hand rule;
- For example, the axis of the leg hip joint Pitch is close to the Y axis (Pitch) of the complete machine, so the positive direction of the hip joint Pitch is to the left, and the positive rotation direction of the joint can be determined by the right-hand rule.
