4. 产品概况
4.1 产品介绍
-
天工行者系列机器人是深圳优必选科技股份有限公司联合北京人形机器人创新中心有限公司研发的全尺寸纯电驱拟人奔跑机器人,具备高度仿生的躯干构型和拟人化的运动控制能力。最高可拥有 42 个自由度,双臂最高采用七自由度机械臂设计,手腕可搭载高精度六维力传感器,并可配备灵巧五指双手。
-
天工行者系列机器人可实现站立、行走、奔跑及多个特定动作,能够稳定适应斜坡、沙地等复杂地形,具备优异的动态平衡与抗干扰能力。搭载强劲关节驱动、高精度 IMU 与双电池快换系统,整机续航时间超过 3.5 小时。
-
此外,天工行者·无界及天工行者·无疆可集成语音模组与语音交互大模型,支持自然语言交互,整机算力最高可达 550 TOPS。
-
作为通用人形机器人平台,天工行者全系列开放全身关节及传感器接口,便于行业二次开发,以实现科研、教育等场景应用创新。
4.2 功能特点
-
复杂地形自适应:可平稳行走于斜坡、沙地等不规则地形;
-
拟人化奔跑:具备奔跑能力;
-
动态平衡控制:能实时抗外部干扰,维持姿态稳定;
-
运控模式:已部署强化学习运控模式;
-
语音交互控制:搭载语音模组,并支持客户自行搭载语音大模型,实现自然语音指令与交互;
-
开放式接口设计:提供全身关节与传感器接口,支持遥操作、数据采集与二次开发。
4.3 应用场景
本产品设计用于科研教学场景。
注意事项:
-
用户可通过二次开发探索其他应用场景,但需自行确保符合该应用场景项下的法律法规、安全要求以及其他需要满足的资质;
-
任何超出科研教学用途的使用,相关责任均由用户自行承担;
-
禁止在无安全防护的公共场所或高风险环境等场景下(如救援、医疗护理等)直接使用原厂配置产品。
4.4 产品组成
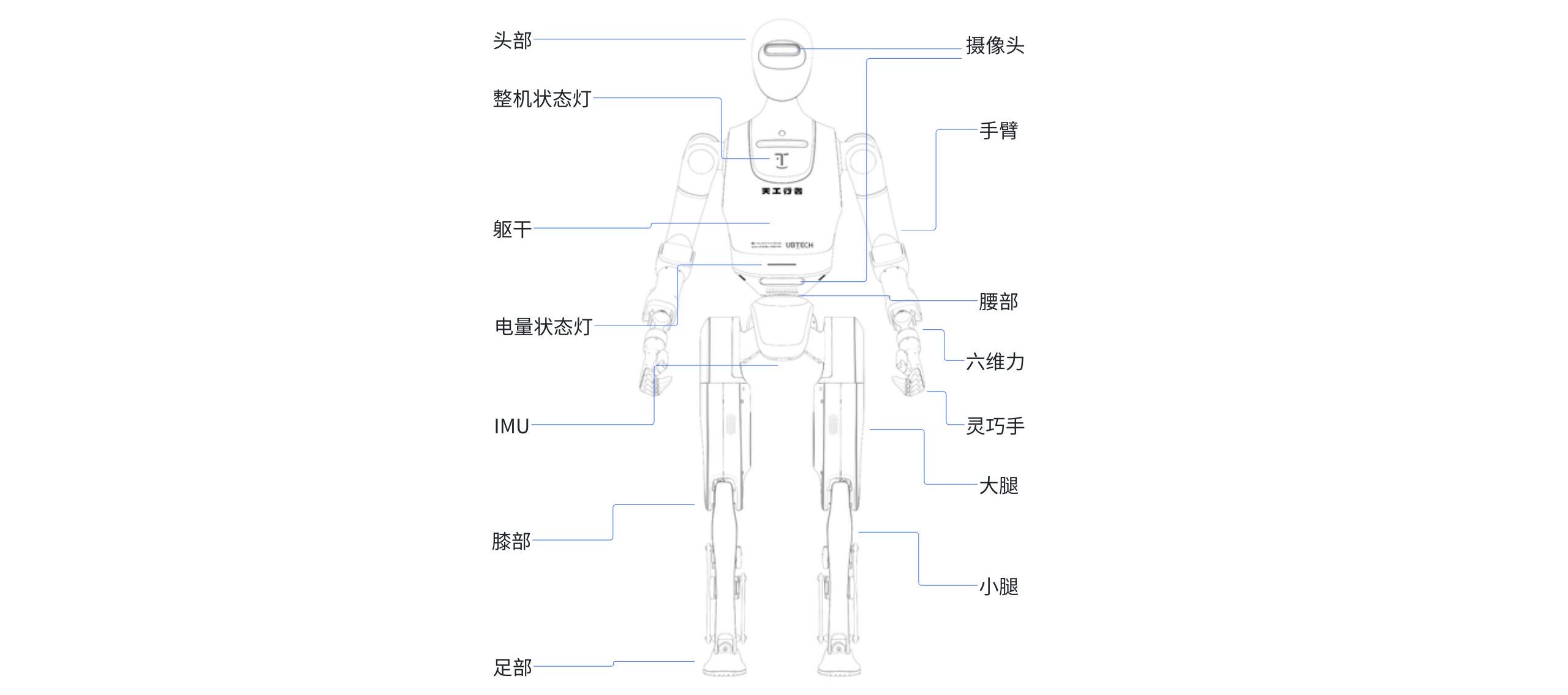
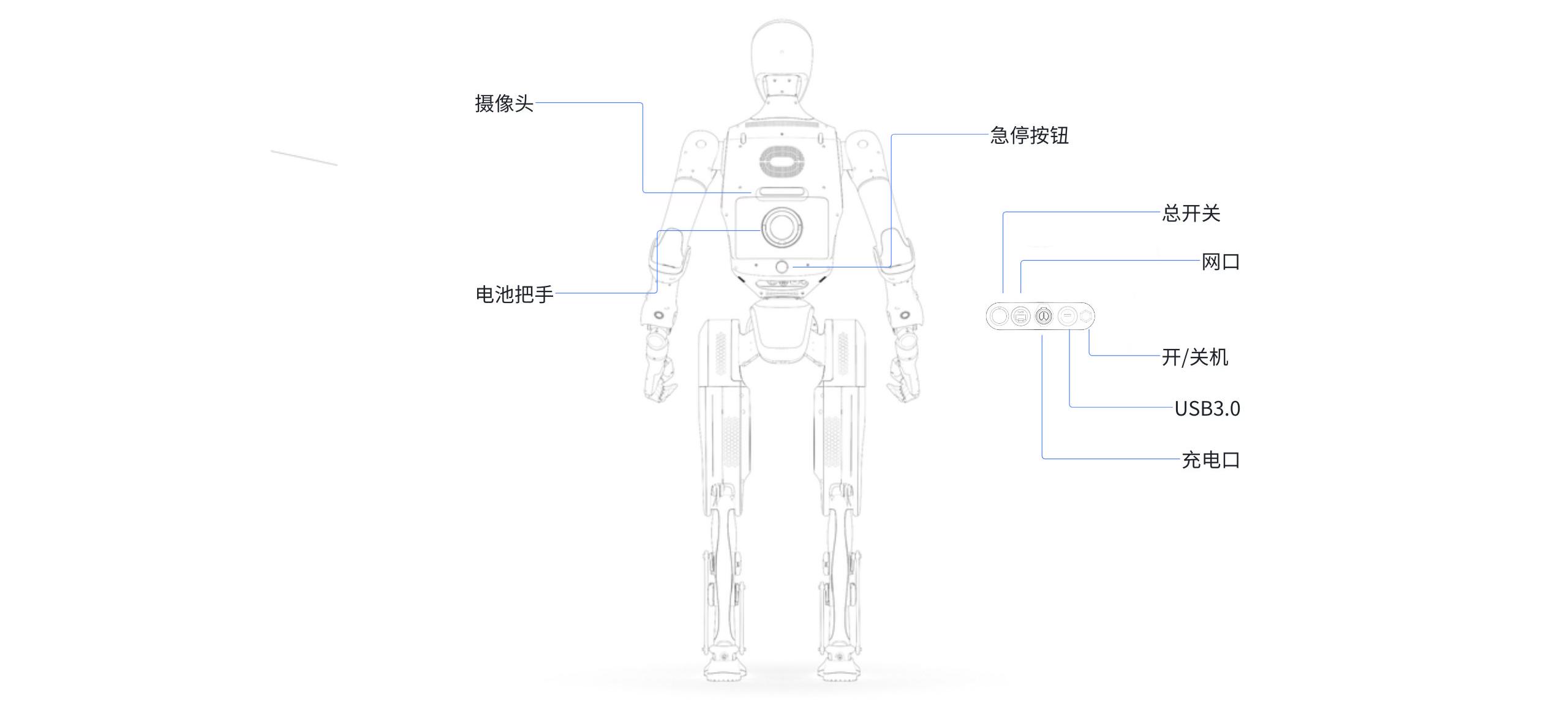
4.4.1 机器人部件说明
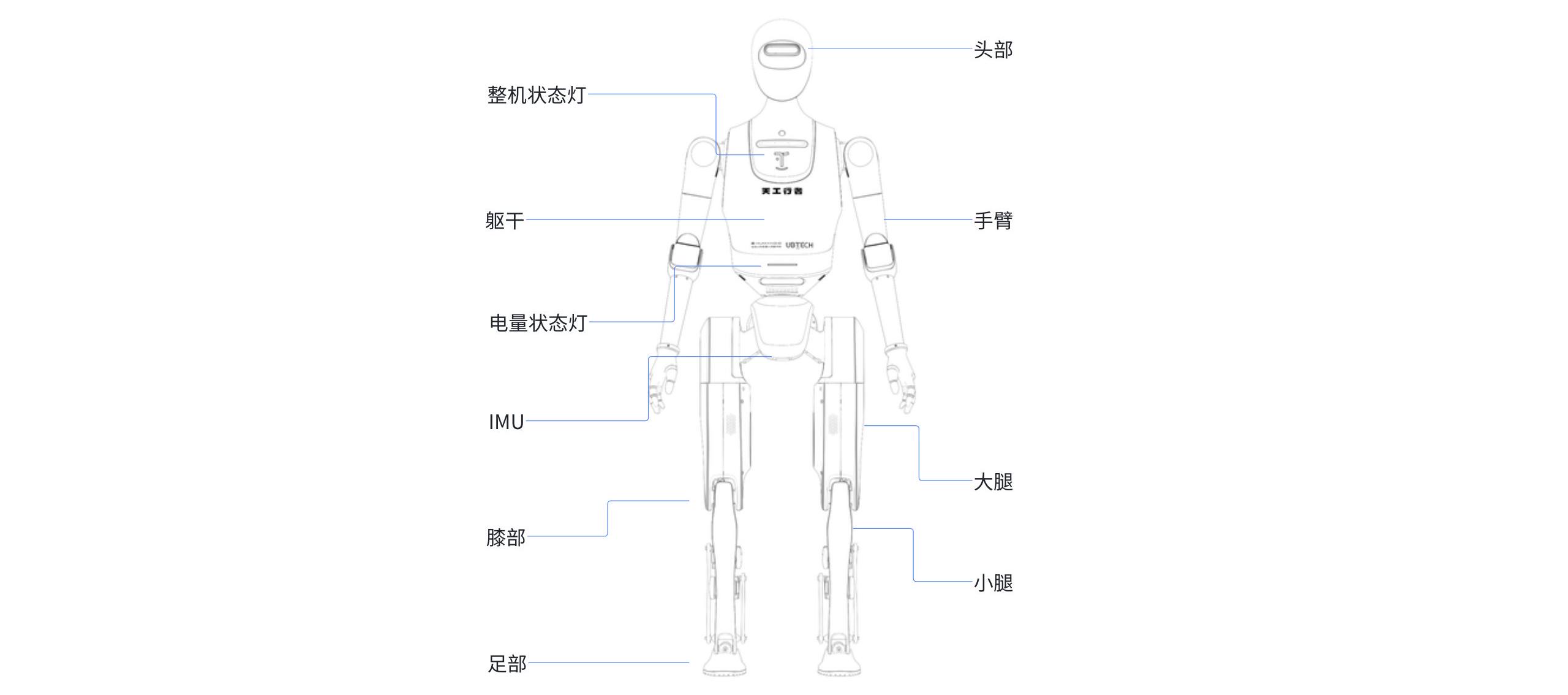
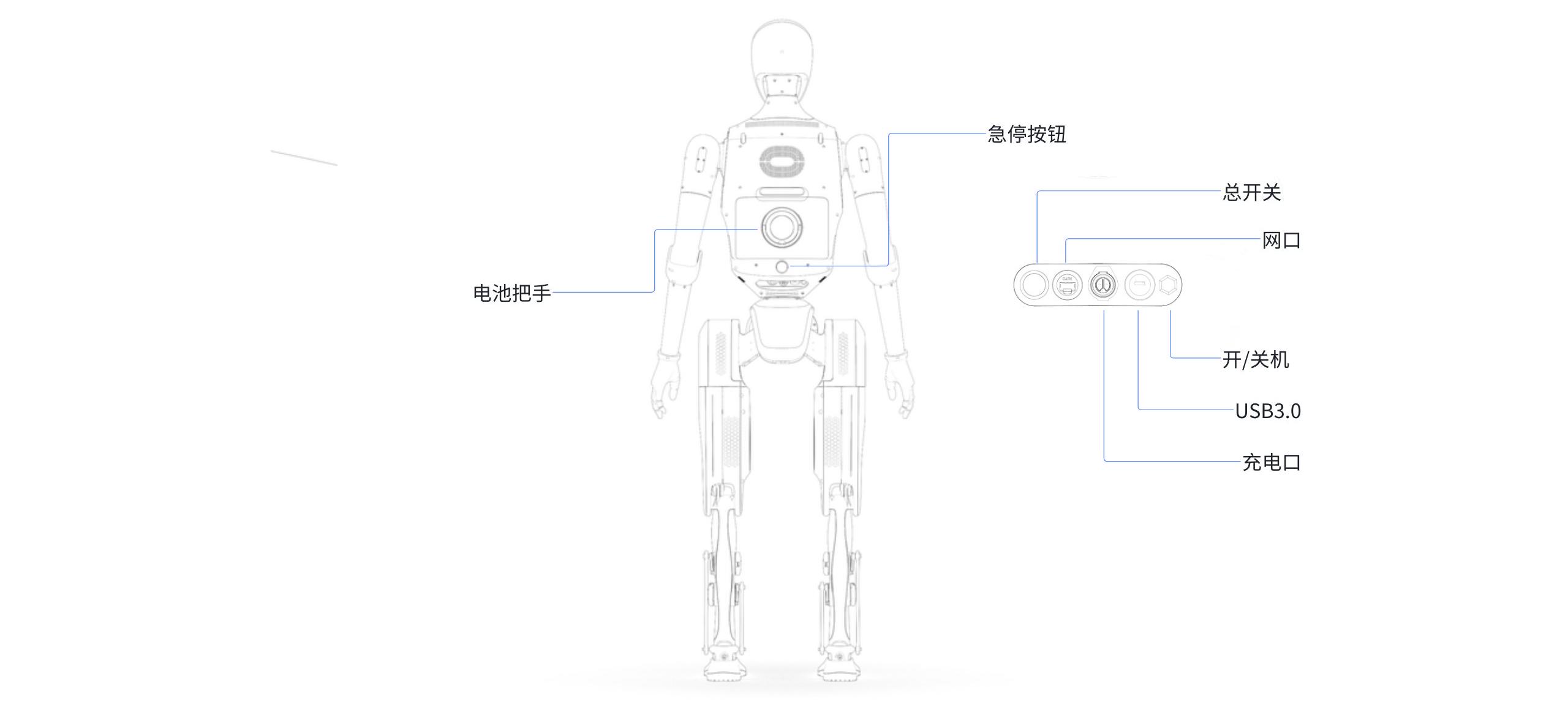
4.4.1.1 天工行者
4.4.1.2 天工行者·无界
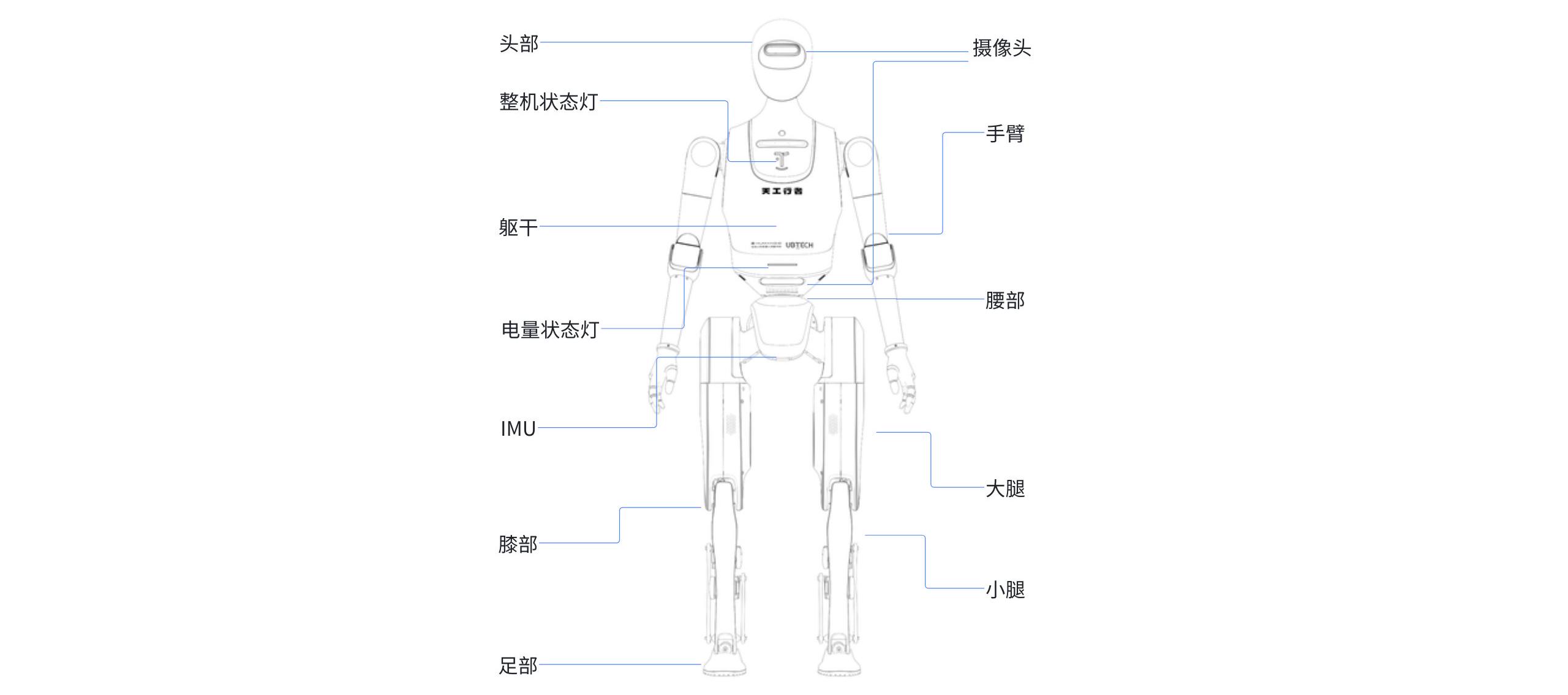
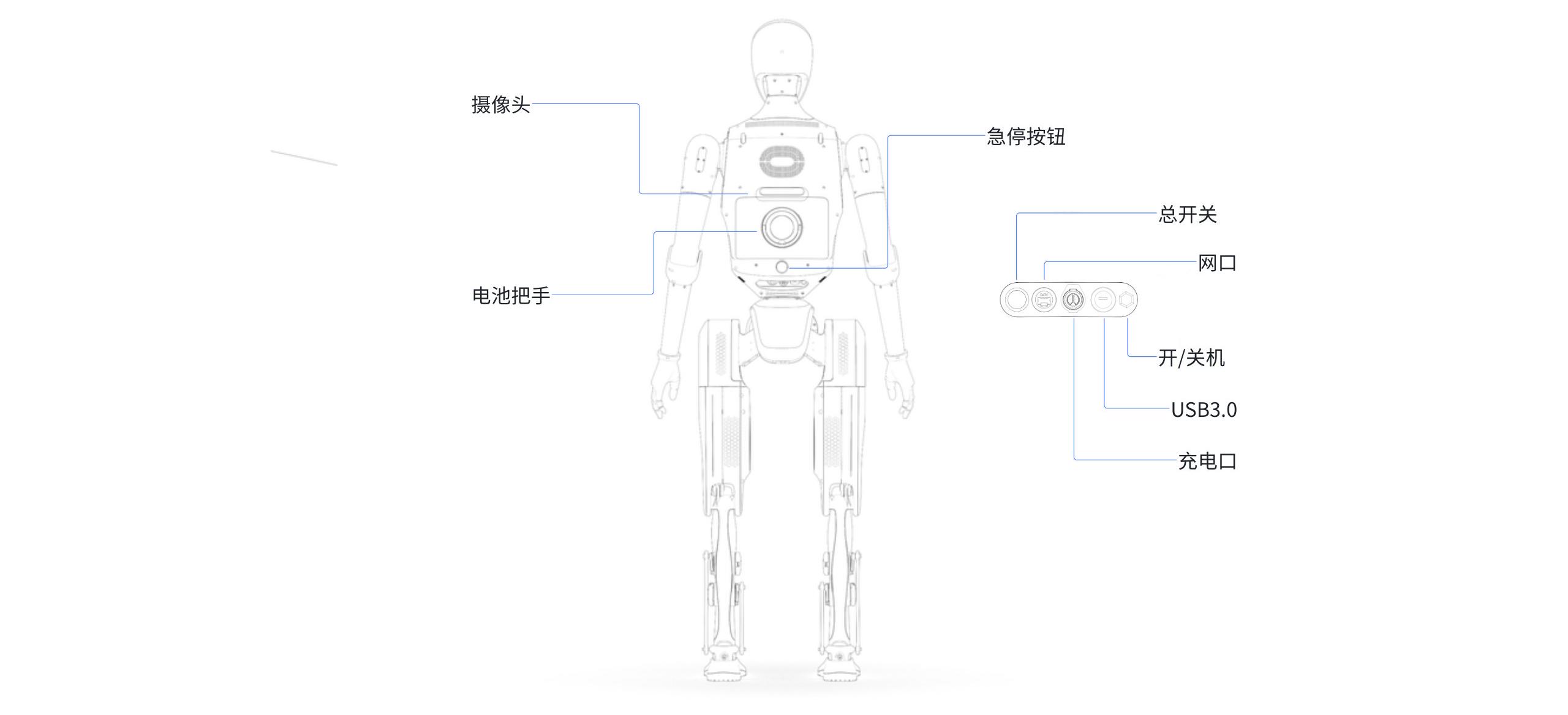
4.4.1.3 天工行者·无疆
4.4.2 遥控器说明
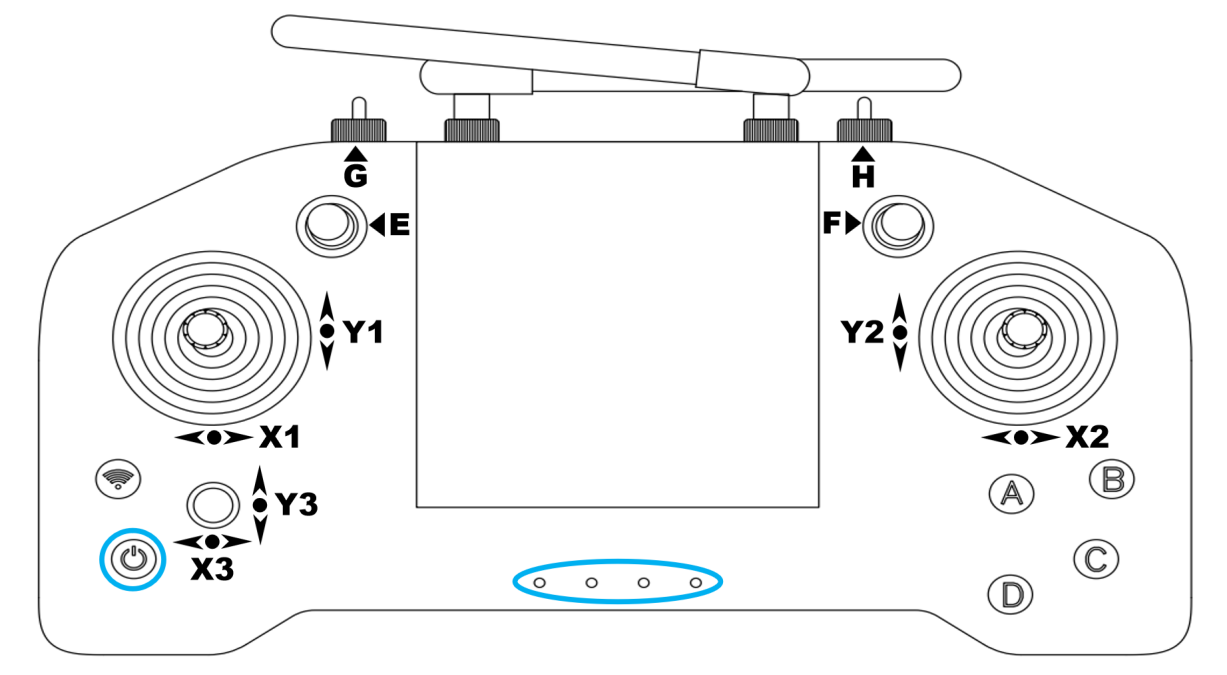
遥控器按键示意图
拨杆功能说明
| 拨杆 | 功能位置 | 档位含义 |
|---|---|---|
| G | 整机运行与失能急停切换 | 左:客户自定义业务模式(预留) 中:常规运行模式(默认) 右+C:关节失能 |
| E | 功能模式选择 | 上:客户自定义导航模式(预留) 中:标准动作控制模式(默认) 下:客户自定义业务模式(预留) |
| F | 按键功能切换 | 上:语音播报 中:动作控制(默认) 下:半身控制模式(预留) |
| H | 运动模式切换 | 左:行走模式 中:站立模式(默认) 右:跑步模式(仅强化学习) |
| 功能 | 按键 | 备注 |
|---|---|---|
| 回零 | D | |
| 僵停 | C | |
| cmd_vel控制模式 | E - 往上拨杆 | |
| 站立 | H - 往中拨杆 + 长按A | 从奔跑状态无法直接进入站立,需要先切换行走 |
| 行走 | H - 往左拨杆-将拨杆回中 | |
| 跑步 | H - 往右拨杆-将拨杆回中 | |
| 特定动作 | 按如下顺序,进行动作指令循环,挥手、握手、鞠躬、跳舞1、跳舞2; B :连续按动,确定动作编号,运控服务开启后默认动作为挥手;动作执行过程中,无法输入动作编号。 A: 短按A,确认指令执行。 特定动作连续执行达到3次时,应调整机器人行走再进入站立以恢复正常步态,再进行动作操作。 | |
| 语料播报 | F-往上拨杆 B:连续按动,确定音频编号 A:短按A,确定音频播放 D:短按D,停止播放 | |
| 左右移动 | X1 - 左摇杆: 左右 | |
| 前后移动 | Y1 - 左摇杆: 上下 | |
| 顺、逆时针旋转 | X2 - 右摇杆: 右左 | |
| 关节失能 | G - 往右拨杆 + C |