6. 操作指南
注:本章节的登录密码请联系客服获取。
6.1 开箱指南
6.1.1 开箱检验
-
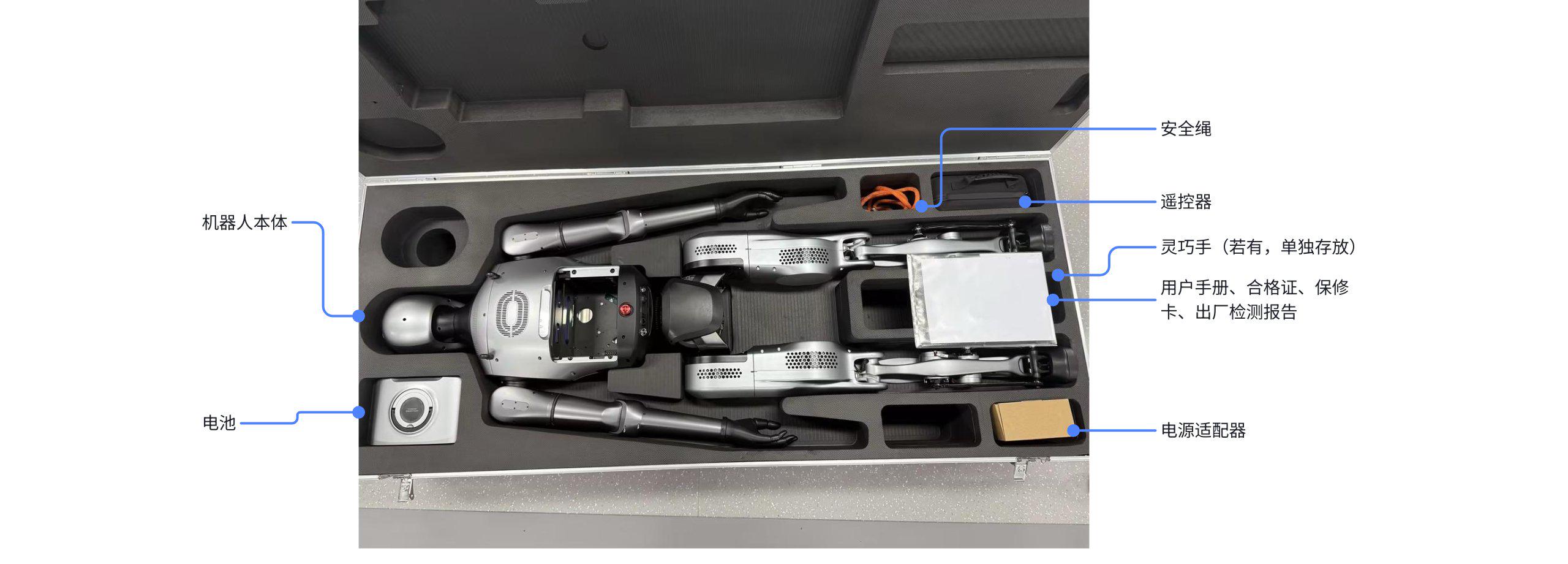
机器人采用航空箱包装,外部尺寸为 1850×780×500mm(长宽高)。

-
机器人运送到用户现场后,请检查航空箱并确定箱体完好无损,如有破损请及时与物流公司及所在地区的供应商联系;
-
确认无误后,转动蝴蝶锁片打开侧面的两个方形锁;
-
打开航空箱,箱内物品如下图所示。请根据3. [装箱清单]对箱内实际物品进行核对,如有缺少请及时联系售后进行补发。
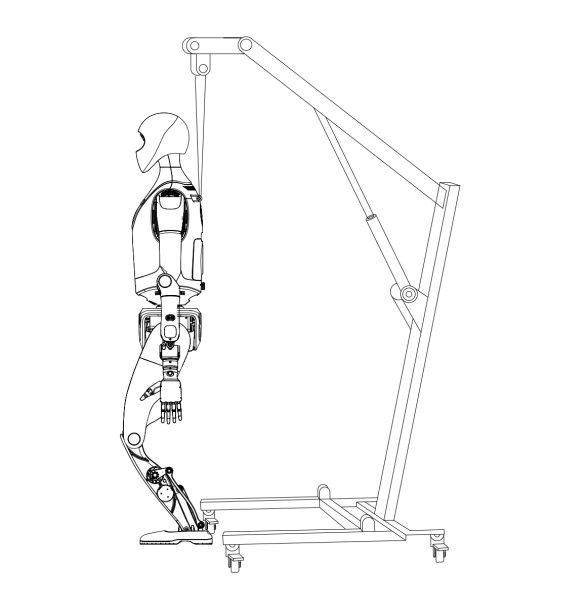
6.1.2 取出机器人
-
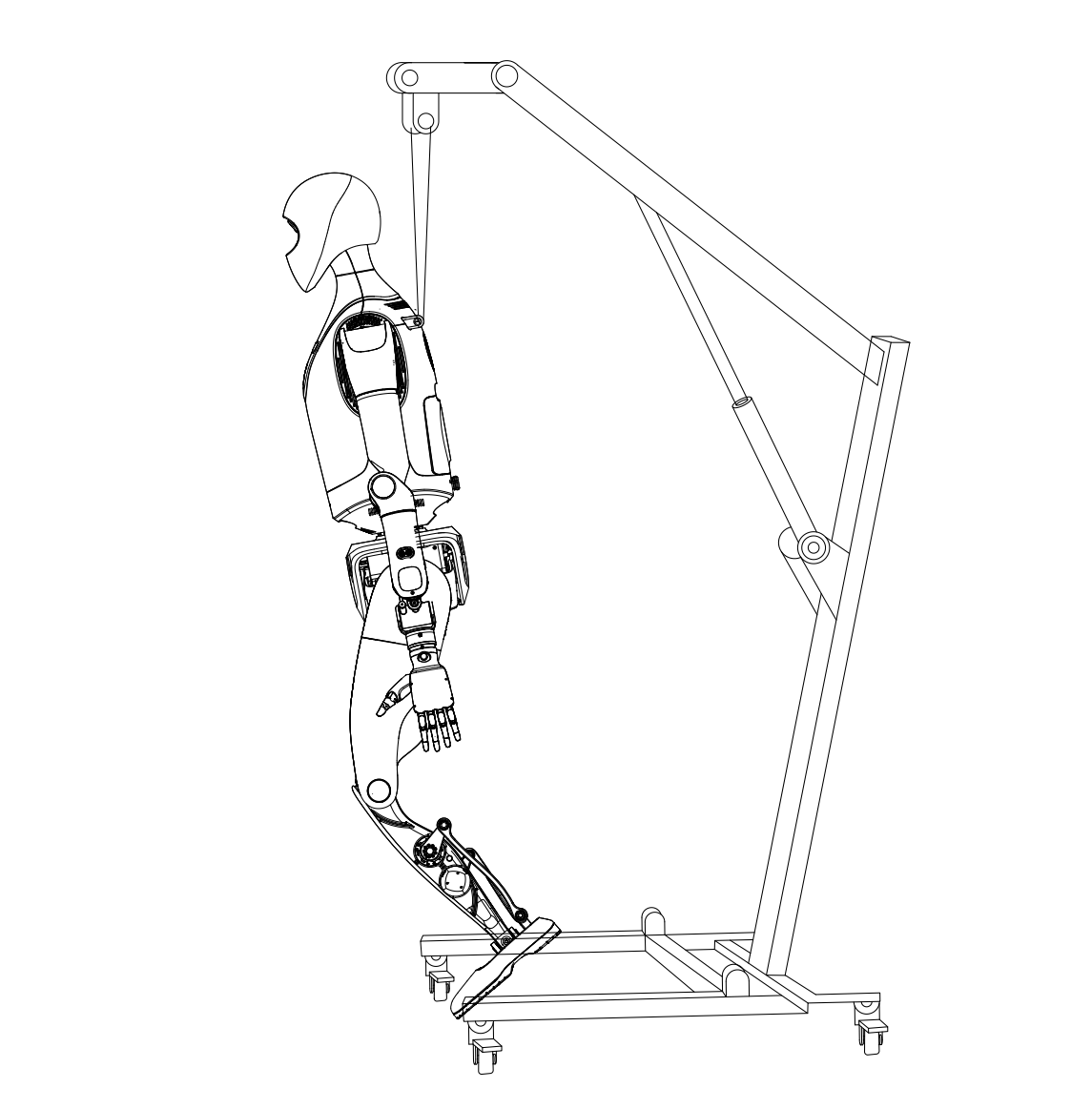
将安全绳的安全钩系上机器人后颈下方的固定吊环,并将安全绳连接到保护支架上;
-
控制保护支架缓慢上升,将机器人吊起;吊起过程须注意机器人各关节位置,必要时应有专人辅助托动,帮助机器人顺利吊起。
-
手动将机器人的足部放在航空箱边缘处;
-
将航空箱向前轻轻推动,使机器人顺利吊上保护支架。
注意:取出机器人后,请勿丢弃运输航空箱。该航空箱专用于运输机器人及其附件。
6.2 使用前准备
6.2.1 环境检查
-
地面平整、不湿滑,不建议在不平坦、陡坡、泥泞、材质松散、湿滑地面等场地使用,建议四周至少有4m的自由活动空间;
-
环境温湿度要求:工作温度 0~30 ℃,相对湿度要求:75%RH以下;
-
环境必须没有易燃、易腐蚀液体或气体,附近不能有强的电子噪声源和磁场。
6.2.2 机器人检查
-
确认机器人悬吊于支架之上;
-
检查各部分是否松散或损坏,确保运动灵活、无卡顿;
-
为了确认机器人电池电量充足,请首先确保机器人已通电(详见[6.3 启动机器人],随后可通过以下方式查看电池电量:
-
通过正面腹部的电量状态灯长度判断(灯效与电量对应关系详见[5.2 状态灯效说明];
-
在诊断页面中的[7.1 机器人状态]页面的右上角查看详细电量。
-
-
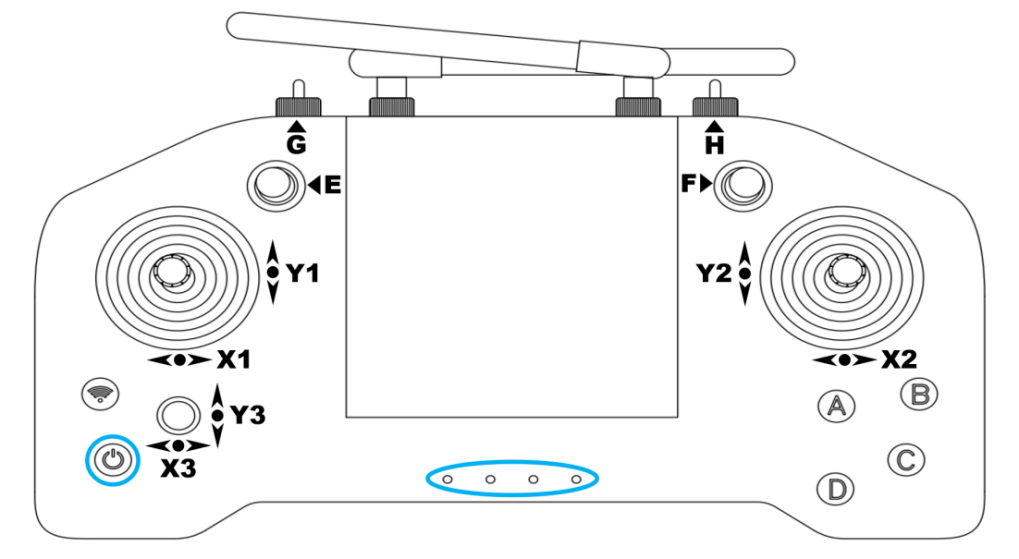
将遥控器开机,并确认遥控器电池是否电量充足,具体操作步骤如下:
-
如图所示,将遥控器上的电源键先短按后立即长按,打开遥控器;
-
此时遥控器下方中央的指示灯亮起,从左至右分别表示遥控器的电量状态。当亮起第1、2、3、4个灯时,对应的电量分别为25%、50%、75%、100%。
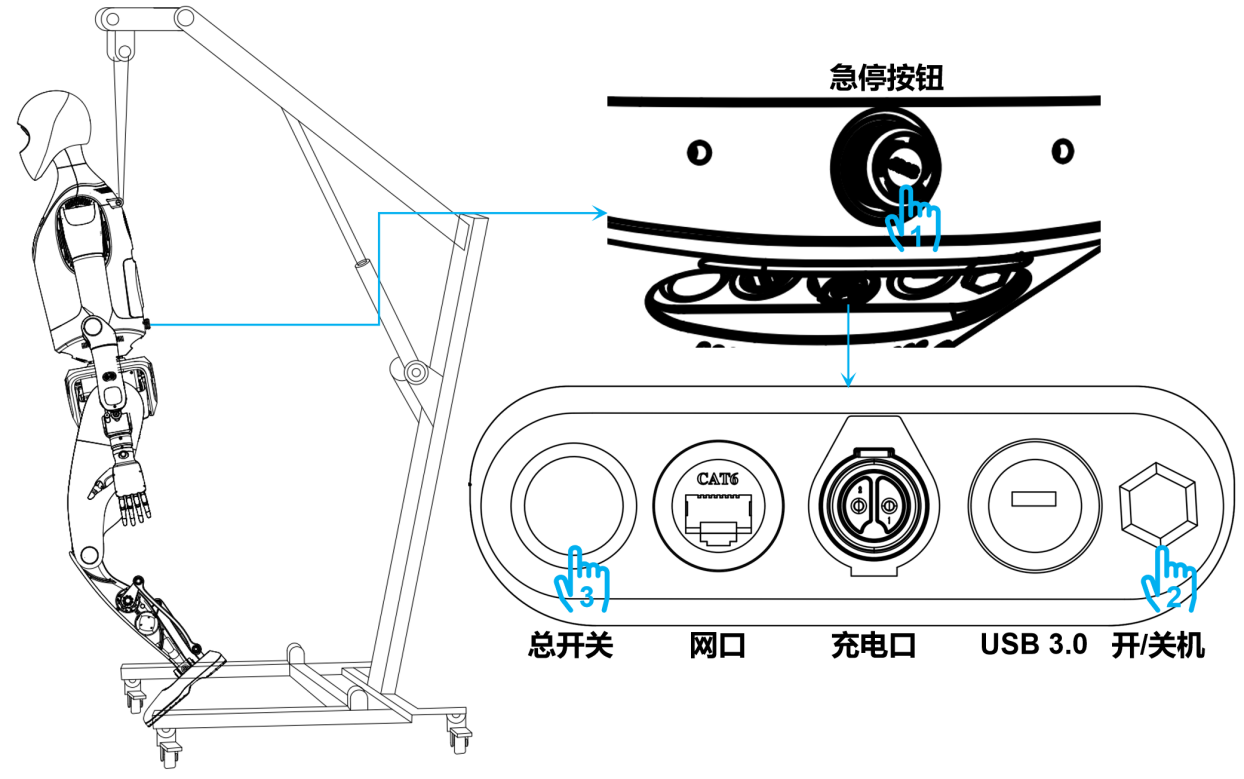
6.3 启动机器人
机器人上电后将自动完成系统启动并进入服务等待状态。具体操作步骤如下:
-
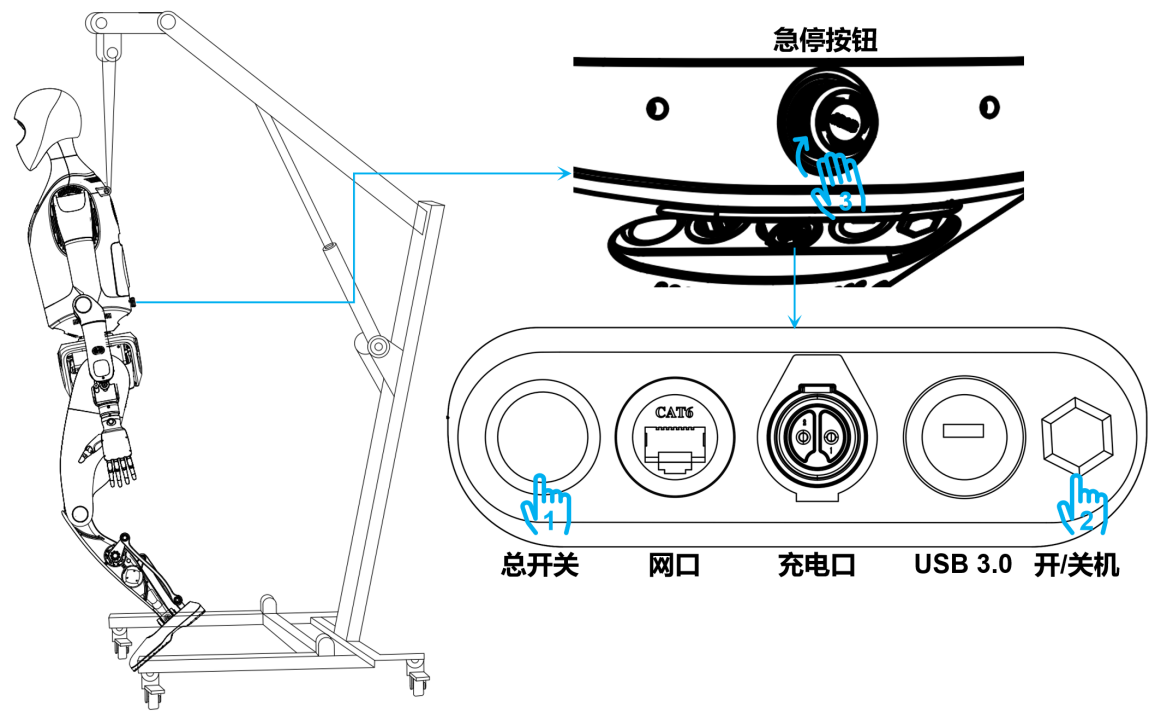
按下总开关键
- 开/关机键指示灯:变为蓝色
-
按下开/关机键
- 开/关机键指示灯:变为红色
-
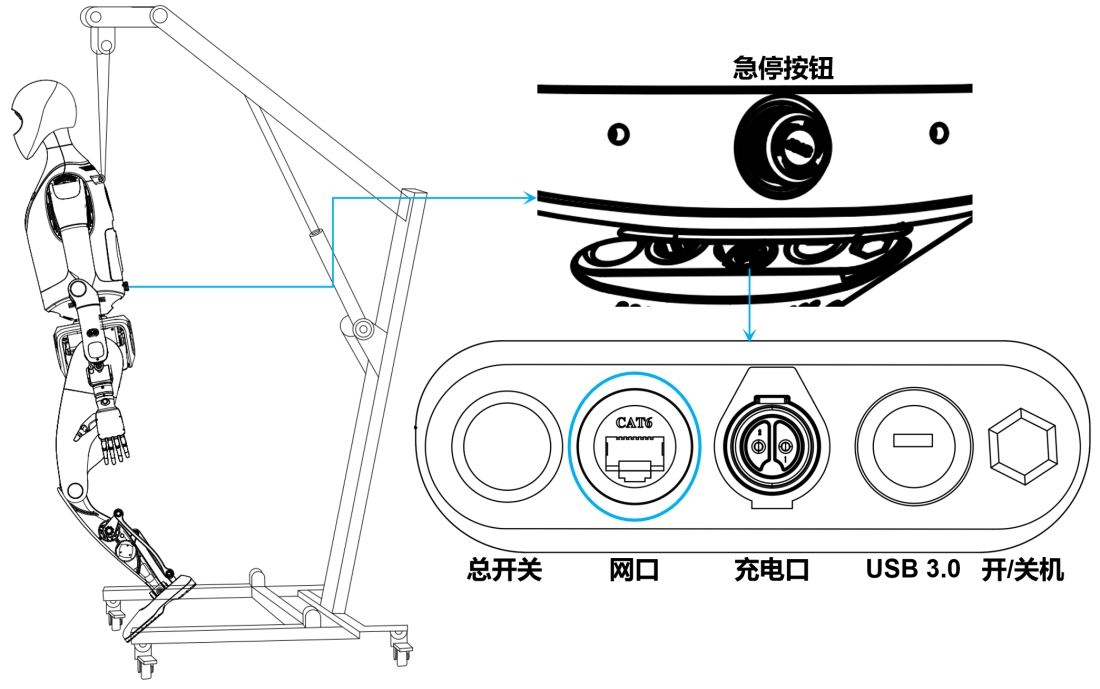
确认顺时针旋转急停按钮直至弹出
-
整机状态灯:开始由熄灭 → 白色 → 炫彩 → 蓝绿呼吸,表示正在唤醒;唤醒成功,机器人会发出长音提示。状态灯进入蓝绿呼吸状态
-
电量状态灯:同步显示当前电量(蓝绿色)
-
-
自动进入服务等待状态,此时可通过遥控器启动机器人
- 整机状态灯:蓝绿(缓慢呼吸)
-
按遥控器 A 键启动自检
- 整机状态灯:炫彩闪1次→蓝绿(急促呼吸)
-
自检结果
-
成功:
-
整机状态灯:蓝绿(常亮);机器人会发出短音提示音
-
进入Ready状态(可操作)
-
-
失败:
-
整机状态灯:红(闪烁)
-
20秒后自动重试
-

注意:自检期间请勿移动机器人。 -
6.4 主控板登录和连接
当前,天工行者系列机器人的主控板最多可由三部分组成:x86主控板,Orin1和Orin2。各主控板的用户名和静态地址如下表所示。在配置Wi-Fi后,可通过ssh命令远程连接至机器人。用户可根据使用需求分别给各主控板配置Wi-Fi。
| 主控模块 | 用户名 | 静态地址 | Wi-Fi | 配置设备 |
|---|---|---|---|---|
| x86主控板 | ubuntu | 192.168.41.1 | 独立Wi-Fi | 天工行者/天工行者·无界/天工行者·无疆 |
| Orin1 | nvidia | 192.168.41.2 | 独立Wi-Fi | 天工行者·无界/天工行者·无疆 |
| Orin2 | nvidia | 192.168.41.3 | 独立Wi-Fi | 天工行者·无疆 |
下列配置Wi-Fi和登录连接的具体步骤以运控x86为例:
配置Wi-Fi步骤
-
用以太网线连接机器人背后的调试用以太网接口和用户电脑端;
-
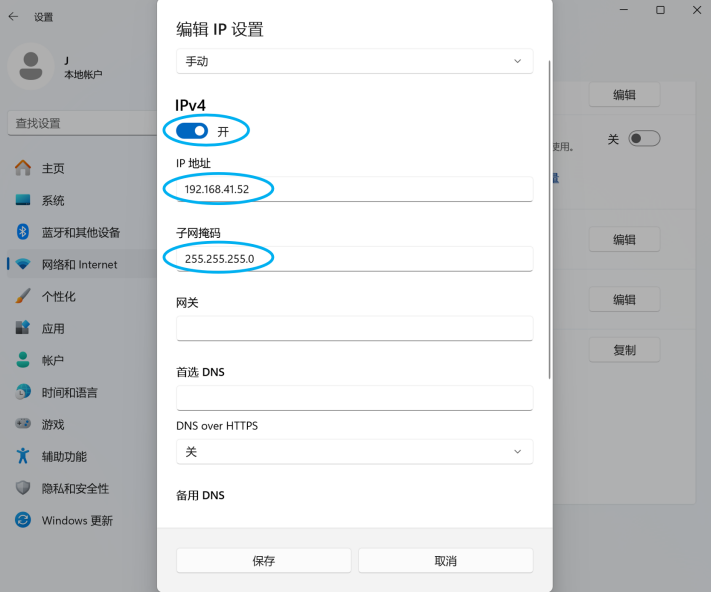
用户电脑配置以太网端口地址为192.168.41.xx/255.255.255.0,具体步骤如下,以Windows系统为例:
-
打开设置,点击“网络与Internet”,随后点击“以太网”,再点击IP分配右侧的“编辑”;


-
按下图打开IPv4按钮,并配置IP地址为192.168.41.xx,子网掩码为255.255.255.0;
-
打开任意终端,输入ping 192.168.41.1,显示下图则表示与x86工控机服务器间的网络连接正常,可进行登录操作;
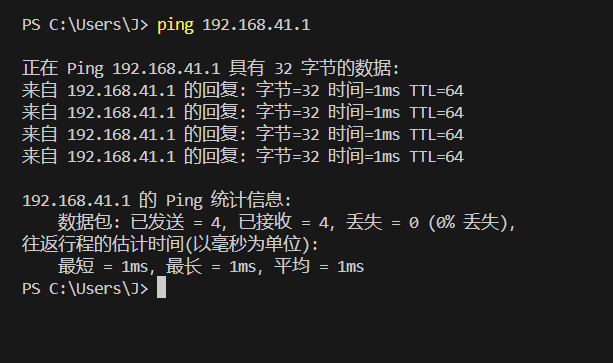
-
继续在终端中输入ssh ubuntu@192.168.41.1,随后输入yes,以及登录密码,显示下图则表示成功登录x86工控机;
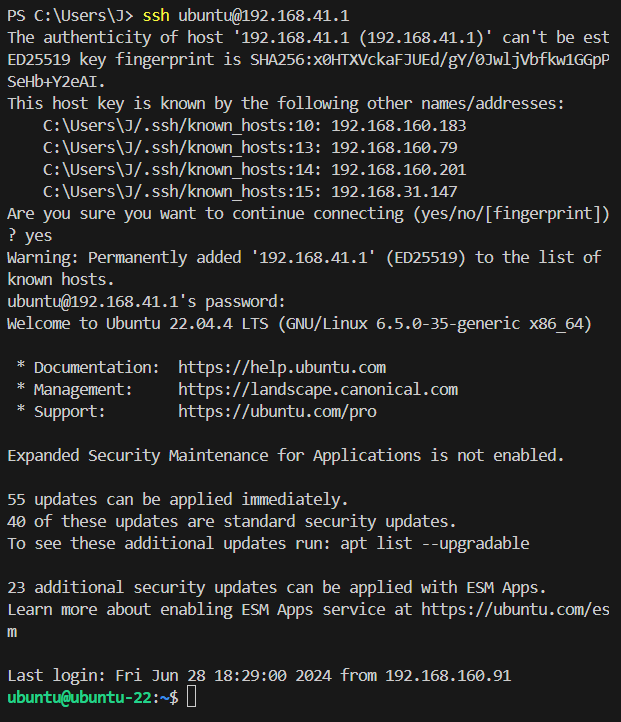
-
在上一步的终端中继续输入以下命令以查看当前可用的Wi-Fi热点,并记录要连接的Wi-Fi的SSID:
sudo nmcli device wifi list -
通过Wi-Fi的SSID及其密码连接到Wi-Fi网络:
sudo nmcli device wifi connect 'Wi-Fi SSID' password 'Wi-Fi密码' -
输入以下命令以查看无线网络接口的当前配置和状态,以检查并确认是否已经成功连接到指定的Wi-Fi网络。自此Wi-Fi配置完成,您可以拔掉网线。
ifconfig
Wi-Fi连接步骤
Wi-Fi配置完成的前提下,每次机器人无需再配置,直接用Wi-Fi连接x86工控机的步骤如下:
-
用户电脑打开任意终端,输入命令ifconfig,查看给无线网络接口配置的IP地址,即‘wlan0/wlp2s0’的接口下的字段后的IP地址;
-
输入命令ssh ubuntu@x.x.x.x直接连接x86工控机服务器,其中x.x.x.x为上一步获取到的IP地址。随后输入yes,以及登录密码,自此登录成功。
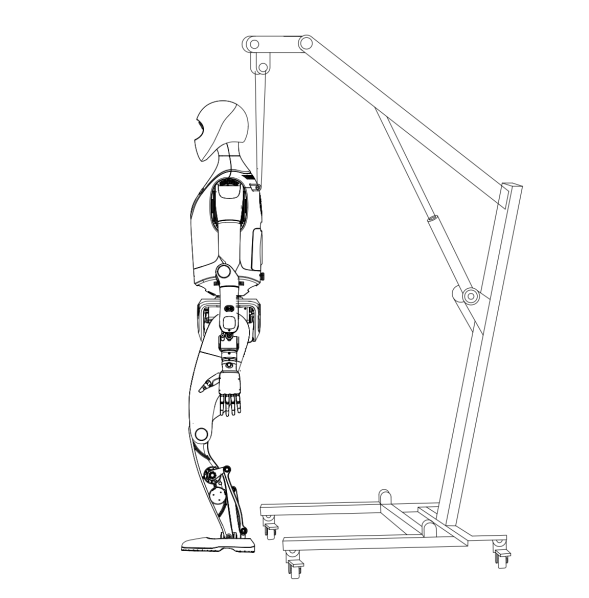
6.5 落地站立
操作步骤:
-
按遥控器上的“D”键以回零到初始状态;
注意:按下“D”键前,机器人必须固定在保护支架上。 -
控制保护支架缓慢下降,下放机器人置地面,保持竖直状态60秒;
-
确认遥控器上的“H”拨杆处于初始的中间零位时,长按下“A”键使机器人站立。站立后,观察机器人是否站立平衡,如无抖动、前后倾倒等异常则平衡。如果不平衡,重复以上操作再次尝试。
6.6 基础动作操作说明
| 注意:建议在保护支架的支撑下使用机器人。 |
|---|
强化学习运控模式下的功能操作
6.6.1 行走模式切换
-
启动踏步模式
- 确认机器人已处于站立状态;
- 将遥控器上的“H”拨杆从中间位置向左拨杆,再拨回中间位置,机器人将进入原地踏步模式。
-
切换至跑步模式
- 在机器人平稳踏步的状态下,将遥控器上的“H”拨杆从中间位置向右拨杆,再拨回中间位置,机器人将切换至原地跑步模式。
6.6.2 移动与转向控制
在踏步模式或跑步模式下,用户可以通过遥控器上的摇杆进行移动和转向操作,其中拨动的幅度决定了速度:
- 向上或向下拨动左摇杆:控制机器人前进或后退。
- 向左或向右拨动左摇杆:控制机器人左右移动。
- 向左或向右拨动右摇杆:控制机器人逆时针或顺时针转动。
6.6.3 停止并返回站立状态
-
在踏步模式下:
- 确认遥控器上的“H”拨杆处于中间零位后,长按下“A”键,机器人将停止移动并返回站立状态。
-
在跑步模式下:
- 先将遥控器上的“H”拨杆从中间位置向左拨杆,再拨回中间位置,切换回踏步模式;
- 确认遥控器上的“H”拨杆处于中间零位后,长按下“A”键,机器人将停止踏步并返回站立状态。
| 注意:切勿在跑步模式下直接按下或长按“A”键。 |
|---|
6.7 紧急停止方法
| 注意:若未使用保护支架,执行以下紧急操作可能导致机器人失稳跌落,请谨慎操作。 |
|---|
-
僵停: 遇到以下情况,需要及时按下遥控器上的“C”键。此时机器人全身所有关节立即僵停,身体将不能保持平衡,需要防摔防护,尽可能及时扶住机器人:
-
机器人运动不正常,不符合预期:如速度或方向错误;
-
预测存在风险时:如机器人即将接近障碍物或人群而无法及时停止。
-
-
关节失能:
遇到以下紧急情况,需要及时同时将遥控器上的“G”拨杆向右拨并按下“C”键,会让机器人的关节失能。此时关节断电,机器人无法保持任何姿态,会立即瘫软并倒下:
-
机器人突发故障:如传感器或电子元件异常,可能导致进一步损坏;
-
机器人姿态不稳:如机器人在不安全的位置或角度,可能导致跌倒或其他危险。
-
-
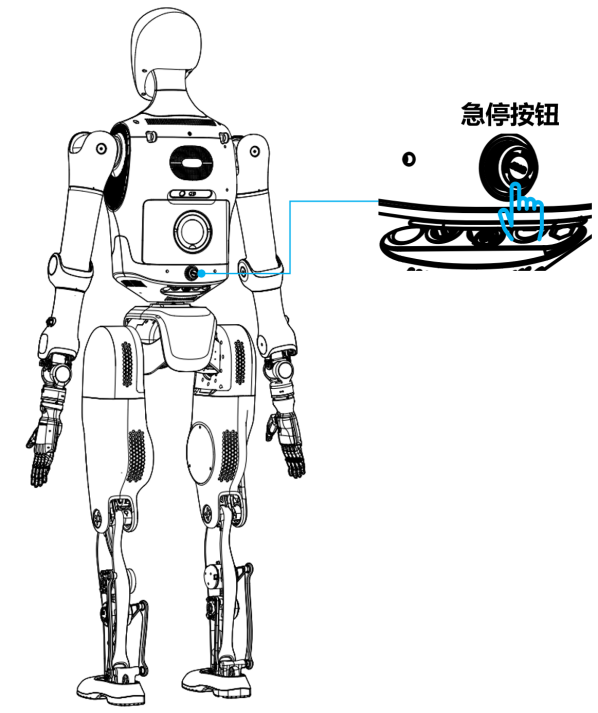
急停按钮:
遇到以下危急情况,请立即按下机器人背部的急停按钮,再长按开/关机键6秒,最后按下总开关键以切断所有电源。此时机器人无法保持任何姿态,会立即瘫软并倒下。
机器人完成上述急停断电操作后,需重新按照 [6.3 启动机器人]从头启动。
-
机器人冒烟或有焦味;
-
有水或其他异物进入机器人;
-
机器人失控,无法通过遥控器或其他方式停止;
-
机器人损坏,可能导致进一步危险;
-
紧急避险,如高空作业或危险环境中失控;
-
外部环境突变,如地震、火灾等。
-
通过以上的紧急操作指南,您可以在各种紧急情况下迅速采取行动,确保机器人和周围环境的安全。
6.8 关闭机器人
关闭机器人时,请遵循以下步骤:
-
确认机器人已停止并返回站立状态;
-
按下遥控器上的“C”键使机器人僵停;
-
将机器人固定在支架上,并向上吊起;
-
按下急停按钮;
- 开/关机键指示灯:变为红色
-
长按开/关机键6秒;
- 开/关机键指示灯:变为蓝色
-
按下总开关键,此时所有指示灯全部熄灭;
-
将遥控器上的电源键先短按后长按,关闭遥控器。
6.9 装箱机器人
装箱机器人,请按照以下步骤
-
确保机器人已进入关机状态,并在支架上正常吊起。
-
将航空箱摆至与机器人朝向一致。
-
降下支架,将机器人腿部放入航空箱,并确保与保护泡沫接触。
-
拆除安全绳,将机器人上半身及头部托入航空箱,并确保与保护泡沫棉接触;放入过程中应及时调整手臂及装饰手朝向。灵巧手运输时,建议按出厂配置将灵巧手拆卸下来,放在专用运输包,再放入航空箱进行运输。
-
确认无误后,关闭航空箱,并旋转蝴蝶锁片关闭方形锁,锁住航空箱。
6.10 电池充电
6.10.1 充电须知
-
本机直连充电,充电前请关闭机器人电源,确保处于断电状态;充满电后请及时拔掉充电器,避免长期连接;
-
充电环境温度应为 0~30℃,湿度在 75% RH 以下;
-
使用本公司提供的原装专用充电器进行充电,禁止使用第三方电源设备;
-
备用电池包建议储存在电池专用防爆柜中;
-
建议在机器人冷却至室温后再开始充电;
-
充电过程中如出现冒烟、异味、过热、变形等异常,立即拔掉充电器并停止使用;
-
若发生电解液接触眼睛等情况,请立即用清水冲洗眼睛,并及时就医。
6.10.2 充电方式
6.10.2.1 本机直连充电
-
将电源适配器连接至插座。
-
将电源适配器充电线插入充电口。
-
电源适配器指示灯显示红色,即表示正在充电。电源适配器的指示灯变绿即表示电池满电,此时应停止充电,避免电池过充。
6.10.2.2 电池仓换电
-
准备好备用电池包。
-
机器人关机状态,将电池仓锁扣向右旋转,并拔出电池包。
-
将替换的电池包插入电池仓,插入时,将锁扣向右旋转,将电池包推入仓内,将锁扣回归正位,即表示电池包安装成功。
6.10.2.3 电池包充电
-
将电源适配器连接至充电插座。
-
将电源适配器与电池包连接,适配器上红灯亮起,即表示正在充电。电源适配器的指示灯变绿即表示电池满电,此时应停止充电,避免电池过充。