9. 基础动作操作说明
建议在保护支架的支撑下使用机器人。
强化学习运控模式下的功能操作
行走模式切换
-
启动踏步模式
- 确认机器人已处于站立状态;
- 将遥控器上的“H”拨杆从中间位置向左拨杆,再拨回中间位置,机器人将进入原地踏步模式。
-
切换至跑步模式
-
在机器人平稳踏步的状态下
-
将遥控器上的“H”拨杆从中间位置向右拨杆,再拨回中间位置,机器人将切换至原地跑步模式。
-
-
移动与转向控制 在踏步模式或跑步模式下,用户可以通过遥控器上的摇杆进行移动和转向操作,其中拨动的幅度决定了速度:
-
向上或向下拨动左摇杆:控制机器人前进或后退;
-
向左或向右拨动左摇杆:控制机器人左右移动;
-
向左或向右拨动右摇杆:控制机器人逆时针或顺时针转动。
-
-
停止并返回站立状态
-
在踏步模式下:
- 确认遥控器上的“H”拨杆处于中间零位后,长按下“A”键,机器人将停止移动并返回站立状态。
-
在跑步模式下:
- 先将遥控器上的“H”拨杆从中间位置向左拨杆,再拨回中间位置,切换回踏步模式;
-
注意:切勿在跑步模式下直接按下或长按“A”键。
紧急停止方法
注意:若未使用保护支架,执行以下紧急操作可能导致机器人失稳跌落,请谨慎操作。
-
僵停:
遇到以下情况,需要及时按下遥控器上的“C”键。此时机器人全身所有关节立即僵停,身体将不能保持平衡,需要防摔防护,尽可能及时扶住机器人:
- 机器人运动不正常,不符合预期:如速度或方向错误;
- 预测存在风险时:如机器人即将接近障碍物或人群而无法及时停止。
-
关节失能:
遇到以下紧急情况,需要及时同时将遥控器上的“G”拨杆向右拨并按下“C”键,会让机器人的关节失能。此时关节断电,机器人无法保持任何姿态,会立即瘫软并倒下:
- 机器人突发故障:如传感器或电子元件异常,可能导致进一步损坏;
- 机器人姿态不稳:如机器人在不安全的位置或角度,可能导致跌倒或其他危险。
-
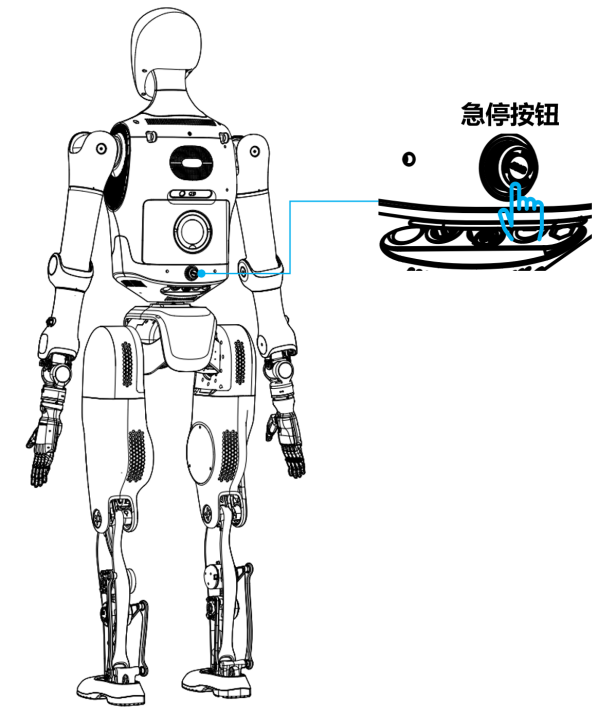
急停按钮:
遇到以下危急情况,请立即按下机器人背部的急停按钮,此时机器人无法保持任何姿态,会立即瘫软并倒下。再长按开/关机键6秒,最后按下总开关键以切断所有电源。
- 机器人冒烟或有焦味;
- 有水或其他异物进入机器人;
- 机器人失控,无法通过遥控器或其他方式停止;
- 机器人损坏,可能导致进一步危险;
- 紧急避险,如高空作业或危险环境中失控;
- 外部环境突变,如地震、火灾等。
机器人完成上述急停断电操作后,需重新按照 启动机器人 从头启动。
通过以上的紧急操作指南,您可以在各种紧急情况下迅速采取行动,确保机器人和周围环境的安全。
关闭机器人
关闭机器人时,请遵循以下步骤:
- 确认机器人已停止并返回站立状态;
- 按下遥控器上的“C”键使机器人僵停;
- 将机器人固定在支架上,并向上吊起;
- 按下急停按钮,开/关机键指示灯:变为红色;
- 长按开/关机键6秒,开/关机键指示灯:变为蓝色;
- 按下总开关键,此时所有指示灯全部熄灭;
- 将遥控器上的电源键先短按后长按,关闭遥控器。
装箱机器人
装箱机器人,请按照以下步骤
- 确保机器人已进入关机状态,并在支架上正常吊起。
- 将航空箱摆至与机器人朝向一致。
- 降下支架,将机器人腿部放入航空箱,并确保与保护泡沫接触。
- 拆除安全绳,将机器人上半身及头部托入航空箱,并确保与保护泡沫棉接触;放入过程中应及时调整手臂及装饰手朝向。灵巧手运输时,建议按出厂配置将灵巧手拆卸下来,放在专用运输包,再放入航空箱进行运输。
- 确认无误后,关闭航空箱,并旋转蝴蝶锁片关闭方形锁,锁住航空箱。
电池充电
充电须知
- 本机直连充电,充电前请关闭机器人电源,确保处于断电状态;充满电后请及时拔掉充电器,避免长期连接;
- 充电环境温度应为 0~30℃,湿度在 75% RH 以下;
- 使用本公司提供的原装专用充电器进行充电,禁止使用第三方电源设备;
- 备用电池包建议储存在电池专用防爆柜中;
- 建议在机器人冷却至室温后再开始充电;
- 充电过程中如出现冒烟、异味、过热、变形等异常,立即拔掉充电器并停止使用;
- 若发生电解液接触眼睛等情况,请立即用清水冲洗眼睛,并及时就医。
充电方式
-
本机直连充电
- 将电源适配器连接至插座;
- 将电源适配器充电线插入充电口;
- 电源适配器指示灯显示红色,即表示正在充电。电源适配器的指示灯变绿即表示电池满电,此时应停止充电,避免电池过充。
-
电池仓换电
- 准备好备用电池包;
- 机器人关机状态,将电池仓锁扣向右旋转,并拔出电池包;
- 将替换的电池包插入电池仓,插入时,将锁扣向右旋转,将电池包推入仓内,将锁扣回归正位,即表示电池包安装成功。
-
电池包充电
- 将电源适配器连接至充电插座;
- 将电源适配器与电池包连接,适配器上红灯亮起,即表示正在充电。电源适配器的指示灯变绿即表示电池满电,此时应停止充电,避免电池过充。
操作诊断指南
天工行者部署有诊断综合管理平台,通过WebSocket连接实现远程监控和设备操作。平台展示机器人各部件的状态信息,涵盖关节、IMU、电源、电池等详细内容,还可查看版本和系统信息。此外,用户能实时查看机器人系统的topic数据,并使用便捷的更新按钮保持信息同步,确保设备始终处于最佳运行状态。
诊断平台访问地址
获取x86板的ip地址后,拼端口号8080,以访问诊断平台,如:
192.168.41.1:8080
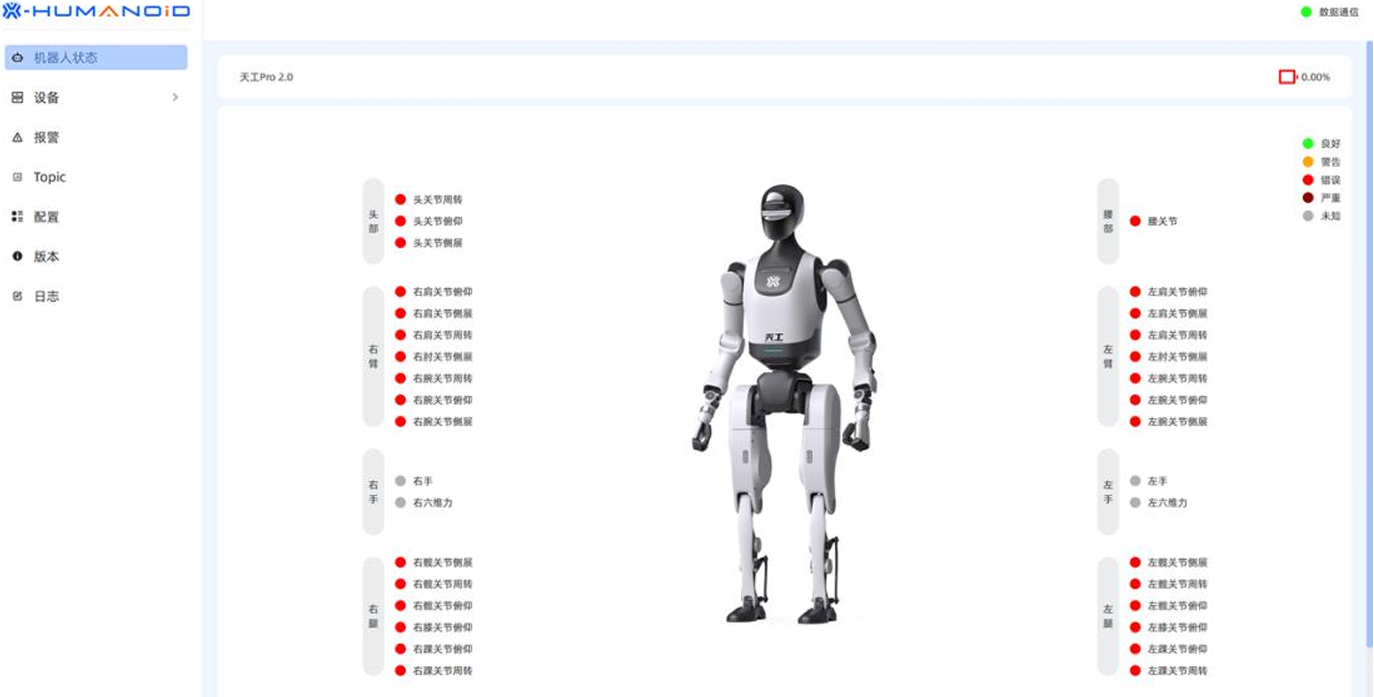
机器人状态
- 机器人状态页面通过颜色指示各关节的状态和当前电池电量,具体的颜色含义请参见页面右上角的状态图例;
- 右上角的数据通信状态指示器显示WebSocket连接状态:红色表示连接断开,绿色表示连接正常。
设备
- 设备页面展示了机器人的基本信息,各部件当前的版本信息,以及各主控板的详细系统信息;
- 用户可以通过点击“连接”按钮,输入Wi-Fi的SSID及其密码,连接至Wi-Fi网络,并获取各主控板IP地址。
关节
- 在关节页面,可以查看各关节的详细信息列表。点击“刷新”按钮可刷新单个关节的行数据;勾选多项后,点击“批量刷新”按钮可同时刷新多个关节的行数据。
IMU
- 在 IMU 页面,可以查看各 IMU 的详细信息。点击对应的“更新”按钮可刷新该 IMU 的数据。
电源
- 在电源页面,可以查看各电源的详细信息。点击对应的“更新”按钮可刷新该电源的数据。
电池
- 在电池页面,可以查看各电池的详细信息。点击对应的“更新”按钮可刷新该电池的数据。
遥控
- 在遥控页面,可以在页面左侧查看遥控器的详细信息。点击“更新”按钮可刷新该遥控器的数据。
- 页面右侧控制界面默认展开,点击“控制界面”按钮可以关闭。点击对应的动作按钮可遥控机器人执行相应的动作。该功能使用时,需要保持机器人在站立状态,且遥控器“E”拨杆往上拨
声卡
- 在声卡页面, 可以查看声卡和音频文件的详细信息。
- 点击各音频文件对应的“播放”或“删除”按钮可操作机器人播放或删除该音频。
报警
- 在报警页面,可以查看各报警的详细信息。点击“全部清除”按钮可清除当前所有报警信息。
Topic
- 在 Topic 页面,可以查看详细的 topic 数据。点击“更新”按钮可更新单个 topic 的数据;点击“全部更新”按钮可刷新所有 topic 的数据。
- 点击某一 topic 行,其详细 topic 数据将显示在右侧的面板中。
版本
- 在版本页面,可以查看详细的设备版本信息,以及固件升级状态。
- 仅当右上角显示为蓝色“可升级”按钮的项目,才可进行版本升级。点击“可升级”按钮后,选择或拖拽上传需升级的包(仅支持.tar.gz格式),随后点击“开始上传”按钮。
- 上传成功后,点击“开始升级”即可进行版本升级。
- 当界面显示警告“waiting estop pressed”时,表示需要先按下急停按钮再向右旋开,方可继续升级流程。
- 出现升级成功提示后,表示版本升级成功。
日志
- 在日志页面,点击“获取日志”按钮可以下载所选时间段的系统日志、内核日志、应用日志、bag日志。
- 加载完成后,可从最后的URL下载所选日志压缩包。